Unmanned aerial vehicle cluster collaborative flight path planning method considering communication time delay
A track planning and unmanned aerial vehicle technology, applied in three-dimensional position/course control, data processing application, prediction, etc., to achieve the effect of ensuring reliability, ensuring timeliness, and reducing planning complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0117] The simulation hardware is Intel Core i5-6200 CPU 2.30GHz, 8G memory, and the simulation environment is MATLABR2021b. UAV formations perform tasks in a two-dimensional environment of 22000m × 11500m. The safe distance between drones is set to 200m, and the safe distance between drones and obstacles is 200m.
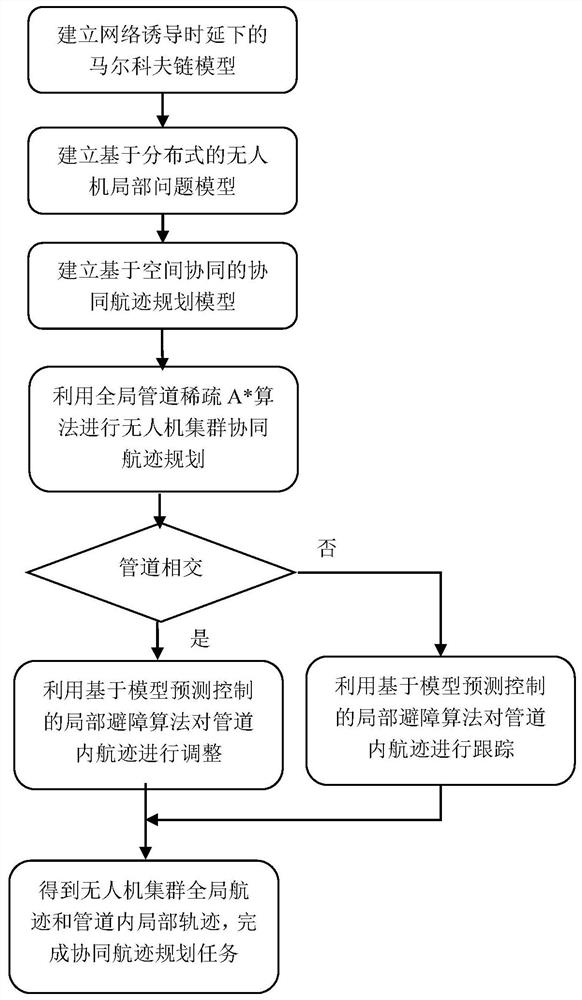
[0118] like figure 1 As shown, the present embodiment discloses a coordinated trajectory planning method for a swarm of unmanned aerial vehicles that considers communication delay, and the specific implementation steps are as follows:
[0119] Step 1: Obtain UAV flight performance parameter information, track constraint information and mission environment information.
[0120] Set the flight speed of the UAV as 100m / s, the overload as 10g, the maximum turn angle as 45°, and the minimum track segment length l min =1500m. The starting point / end position of the UAV and the position and radius of the no-fly zone in the mission environment are listed in Table 1.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com