Path planning method, device, controller and storage medium for unmanned aerial vehicle swarm
A technology for path planning and drones, applied in the field of drones, to improve coverage accuracy, reduce power consumption, and achieve accurate identification and positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
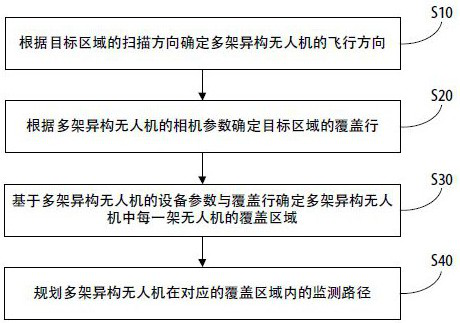
[0103] In order to further illustrate the technical means and effects adopted by the present invention to achieve the predetermined purpose of the invention, the following describes a path planning method for an unmanned aerial vehicle swarm and an unmanned aerial vehicle swarm according to the present invention with reference to the accompanying drawings and preferred embodiments. The specific implementations of the path planning device, the controller and the computer-readable storage medium and their effects are described in detail as follows.
[0104]In order to make a group of UAVs with different camera field of view, flight speed and remaining battery power, that is, a heterogeneous UAV swarm, can cover the specified target area in the shortest time, the present invention combines the traditional vehicle routing problem (vehicle routing problem). routing problem, VRP) into a mixed integer linear program (MILP), and the performance of the proposed VRP solution is verified ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com