Ultra-wideband dynamic inversion positioning method based on multi-model prediction
An ultra-broadband, multi-model technology, applied in the direction of location information-based services, specific environment-based services, measurement devices, etc., can solve the problem that nodes cannot perform inversion and positioning, and achieve the effect of collaborative positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
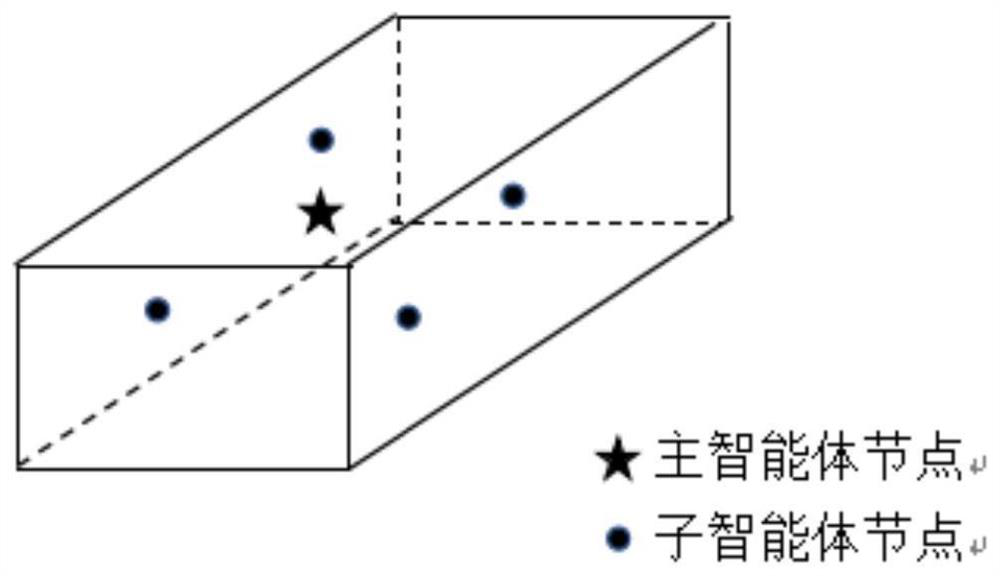
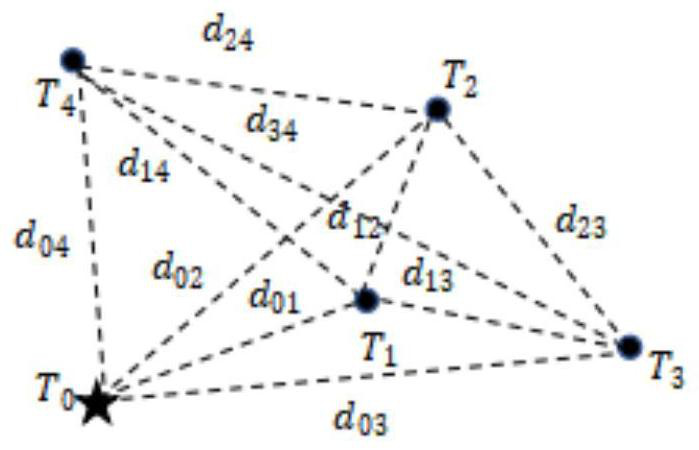
[0043] The ultra-broadband device used in this embodiment can implement distributed distance measurement, and no special distinction is made between tag base stations, and distance measurement can be performed between sensor nodes. define P i , i=0, 1, . . . , N is the agent node, and N+1 is the number of ultra-broadband nodes. Nodes are equipped with ultra-wideband modules, odometers or inertial navigation modules, where P 0 It is the master node that runs the dynamic inversion positioning algorithm. Multi-agents enter the unknown three-dimensional space, and their motion information is provided by the odometer or inertial navigation module. Define the position of the agent at time t as T i,t =[T i,x,t T i,y,t T i,z,t ] T , at time t the velocity is v i,t =[v i,x,t v i,y,t v i,z,t ] T . Any of the above nodes T i , i=0, 1,..., N can communicate with other nodes T j , j=0, 1,..., N, i≠j to communicate and obtain the mutual distance value d ij , but cannot o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com