


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Pneumatic sensing end effector of fruit and vegetable picking robot
A technology for picking robots and end effectors, which is applied to picking machines, manipulators, harvesters, etc. It can solve the problems of complex growth environment of fruits and vegetables, easy damage of skin, and easy damage of fruits and vegetables, so as to increase the wrapping range and improve stability , the effect of reducing the volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
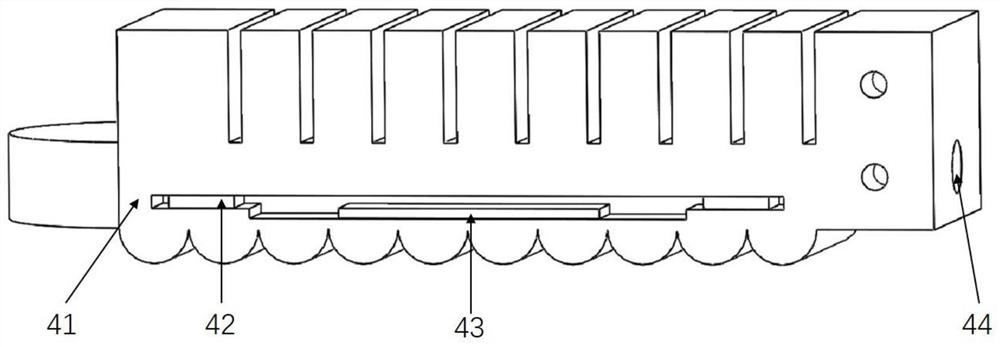
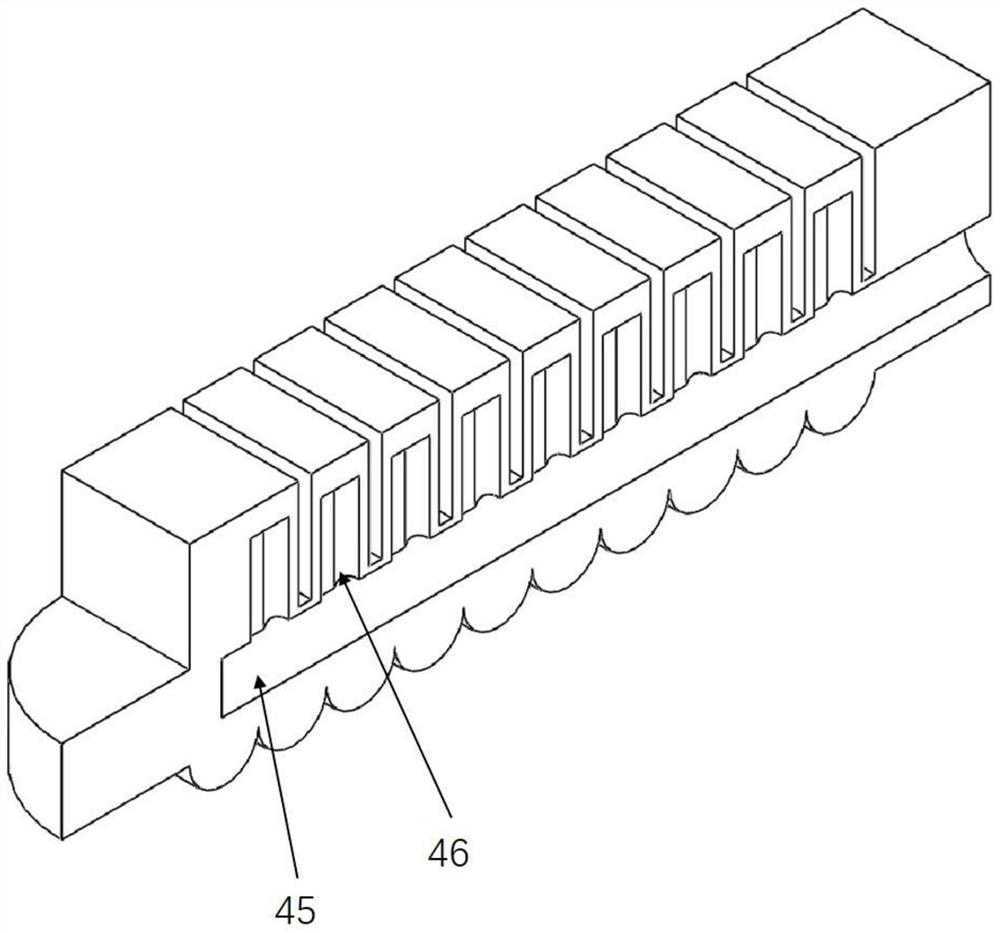
[0032] see Figure 1-Figure 3 , a pneumatic sensing end effector for a fruit and vegetable picking robot, including a flange 1, a bracket 2, a slide rail 3 and two flexible fingers with different lengths, the two flexible fingers are respectively a long flexible finger 4 and a short flexible finger 5, each The root flexible finger includes a series of flexible knuckles 41 connected in sequence; the slide rail 2 is installed on one end of the flange 1, the bracket 2 is installed on the slide rail 3 through bolts, and the long flexible finger 4 and the short flexible finger One end of the finger 5 is respectively installed on the corresponding support 2 as the root of the finger, and the other end of the long flexible finger 4 and the short flexible finger 5 forms a finger free end;
[0033] The inward side of the flexible finger forms the contact working surface of the flexible finger inner side, and the working surface of the flexible finger facing away from the flexible finge...
Embodiment 2
[0036] This embodiment is basically the same as Embodiment 1, especially in that:
[0037] In this embodiment, the slide rail 3 is provided with a plurality of installation positions for adjusting the spacing and position of the two brackets 2 on the slide rail 3 , thereby adjusting the grasping range of the flexible fingers.
[0038] The inner side of the flexible knuckle 41 in contact with the object to be grasped has a hemispherical protrusion or a semicylindrical protrusion, and the curved surface of the protrusion faces the object to be grasped.
[0039] The long flexible fingers 4 and the short flexible fingers 5 are made of flexible silicone material or other flexible materials, and embedded with non-woven fabric.
[0040] The sensing sensor includes a piezoresistive sensor 42 and a piezoelectric sensor 43, which are used to feed back picking force and hardness signals of fruits and vegetables through resistance and voltage.
[0041] The flange 1 is used to connect the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com