


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Robot cluster charging method and system, electronic equipment, medium and program product
A charging method and robot technology, applied in the direction of secondary battery charging/discharging, charging/discharging current/voltage regulation, battery circuit devices, etc., can solve the problems of difficult to understand strategy, not flexible enough, can not meet the management, etc., to achieve the charging strategy flexible effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
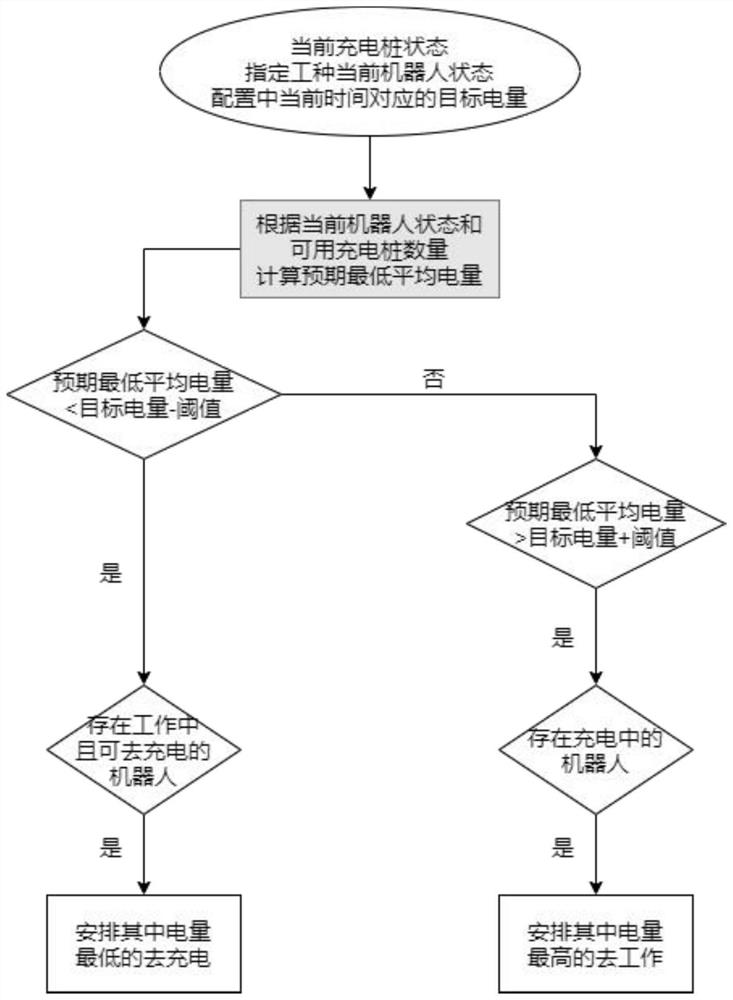
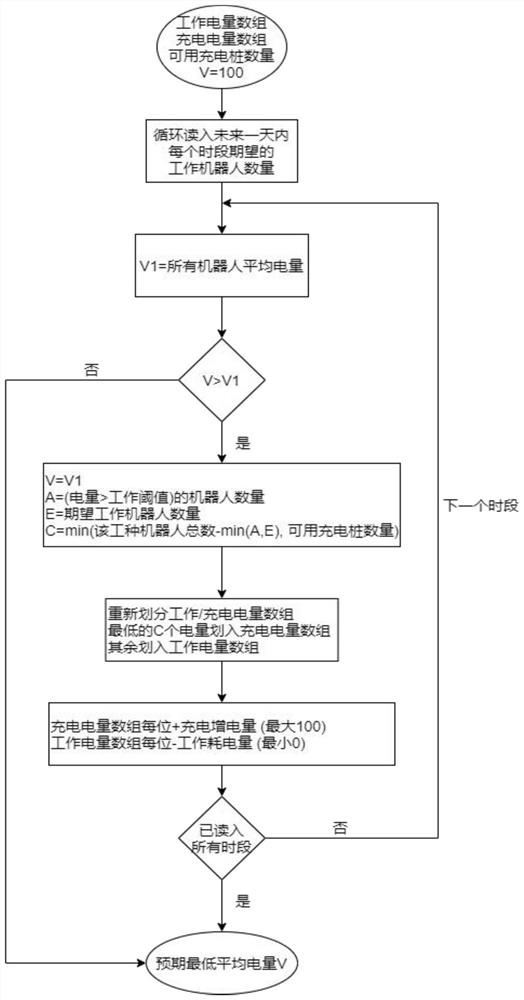
[0054] A robot swarm charging method that supports adjusting the average power, such as figure 1 As shown, the method includes: 101. Obtain the state of the charging pile in the current time period, and the state of each robot in the robot cluster of the specified type of work; read the target power of the robot cluster of the specified type of work in the current time period from the configuration file; 102 . Calculate the corresponding expected minimum average power according to the number of available charging piles in the current time period and the state of each robot in the designated robot cluster; 103. When the expected minimum average power is less than the preset power value, arrange to be in the working state The robot with the medium and the lowest power is charged; 104. When the expected minimum average power is greater than or equal to the preset power value, arrange the robot in the charging state and the highest power to work; wherein, the preset power value is ...
Embodiment 2
[0057] A method for charging a robot cluster supporting the regulation of average power mainly includes the following steps:
[0058] 101. Obtain the status of charging piles in the current time period, and the status of each robot in the robot cluster of the specified type of work; read the target power of the robot cluster of the specified type of work in the current time period from the configuration file.
[0059] It can be understood that, for the current time period, the state of each robot in the robot cluster of a specified type of work (which can be understood as a certain type of work) is obtained, where the robot state refers to the type of robot, the current point, angle, load, power, Information such as tasks being executed and tasks received, here is mainly to obtain the power of each robot and whether it is in a working state or in a charging state. The status of the charging piles in the current time period includes whether each charging pile is supplying power...
Embodiment 3
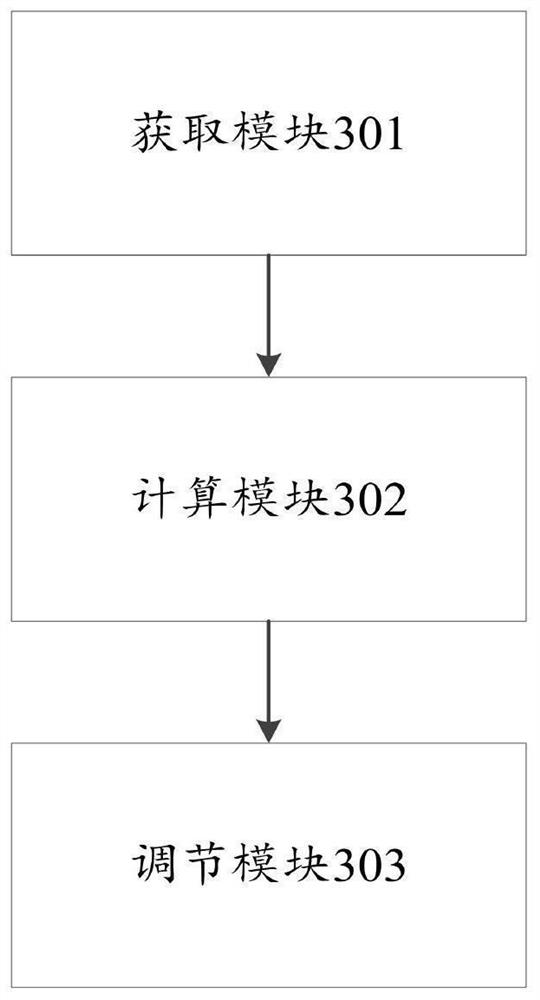
[0087] image 3 A structural diagram of a robot cluster charging system that supports adjustment of average power provided by an embodiment of the present invention, as shown in image 3 As shown, a robot cluster charging system that supports the adjustment of average power includes an acquisition module 301, a calculation module 302, and an adjustment module 303, wherein:
[0088] The obtaining module 301 is used to obtain the state of the charging pile in the current time period, the state of each robot in the robot cluster of the specified type of work; and read the target power of the robot cluster of the specified type of work in the current time period from the configuration file;
[0089] The calculation module 302 is used to calculate the corresponding expected minimum average power according to the number of available charging piles in the current time period and the state of each robot in the robot cluster of the specified type of work;
[0090]The adjustment module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com