Air-ground inspection robot and working method thereof
An inspection robot and robot technology, which is applied to manipulators, manufacturing tools, vehicles that can be converted into airplanes, etc., can solve the problems of small operation range and application scope of inspection robots, and difficult to promote, so as to avoid flight collision accidents and facilitate the The effect of land operation and precise control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
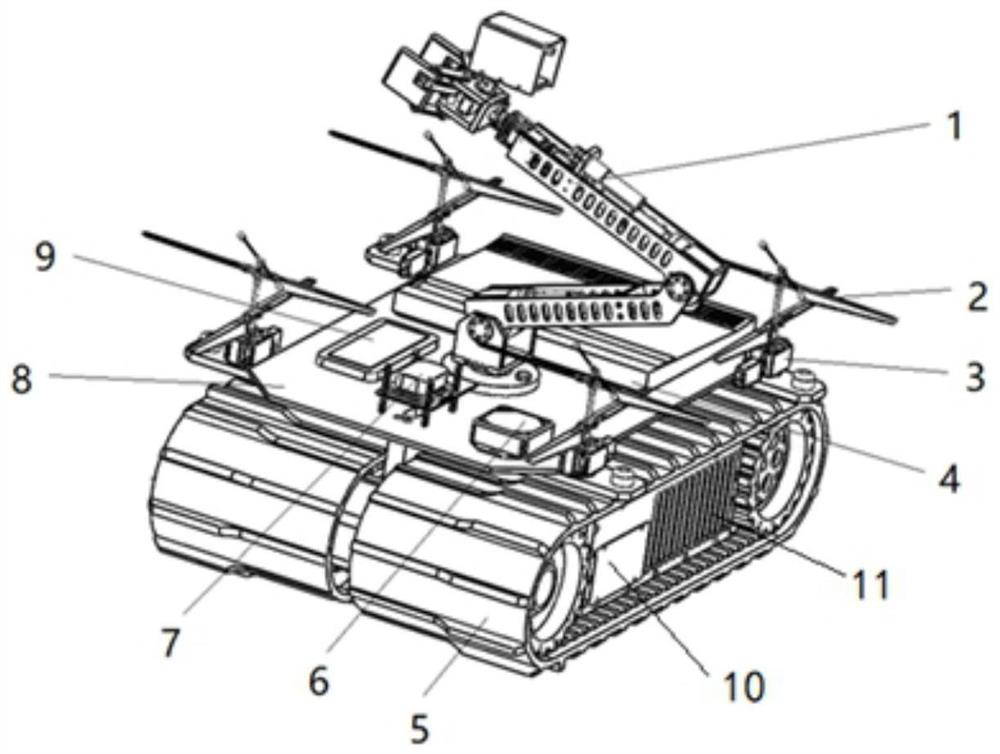
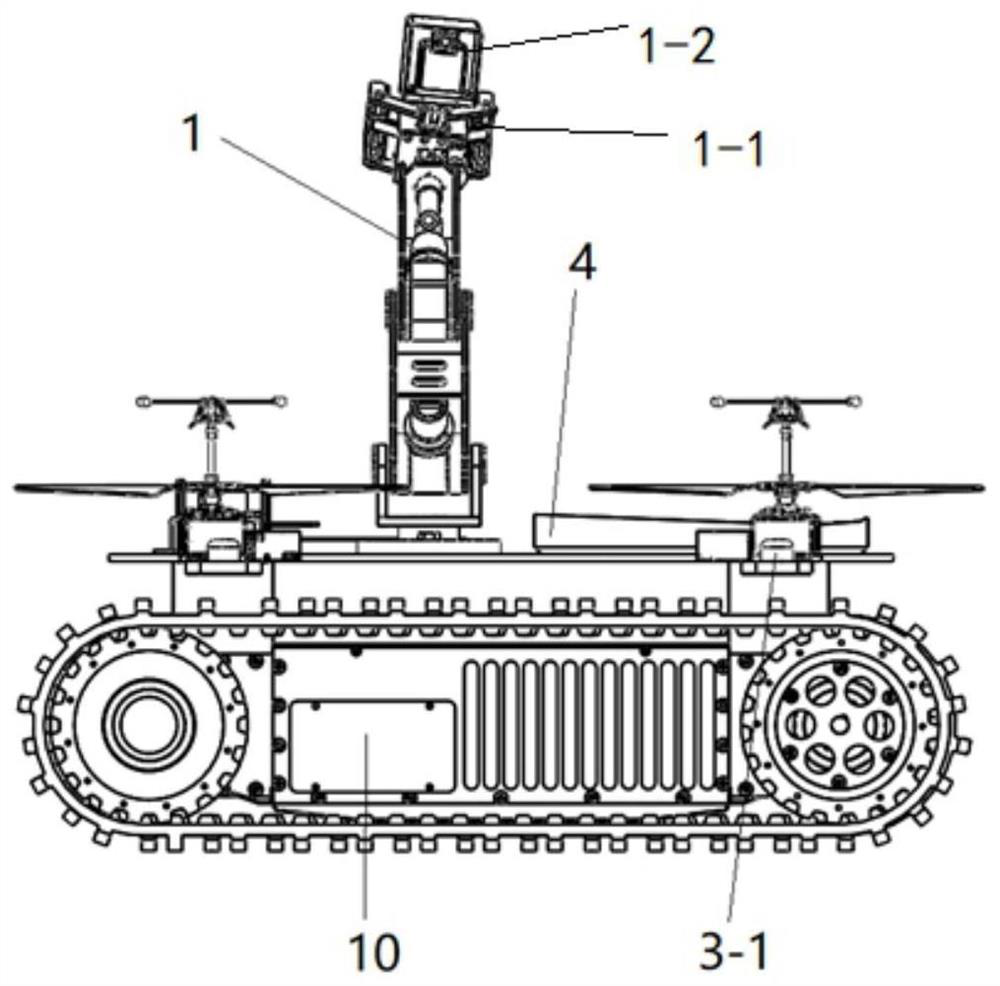
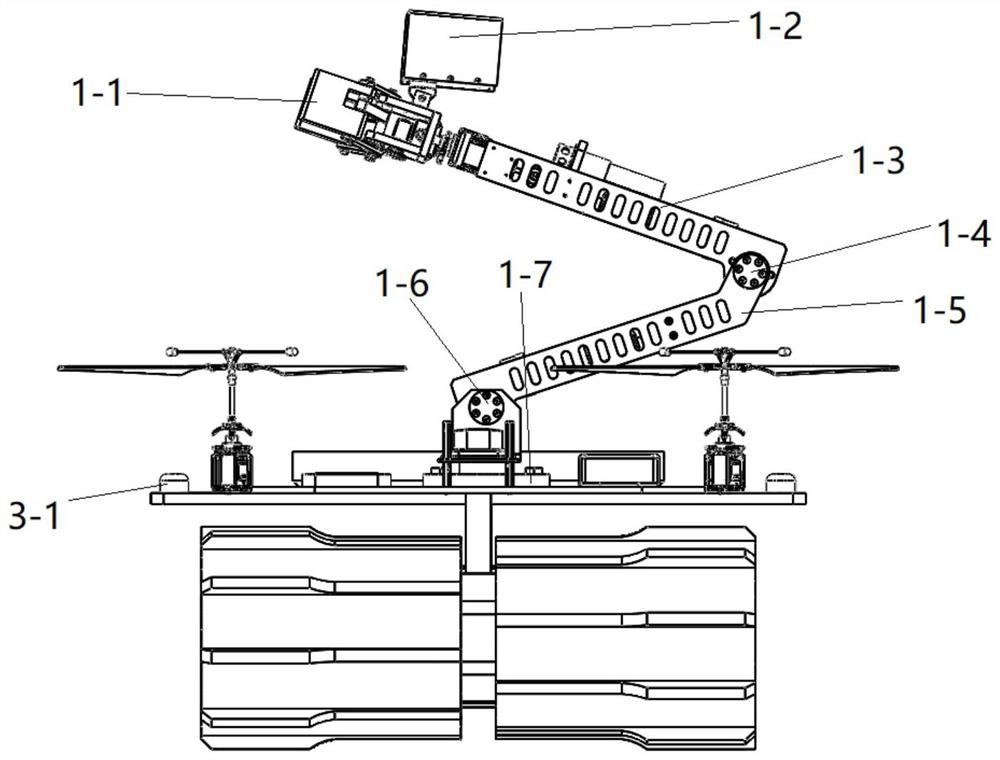
[0021] The invention provides a ground-air inspection robot. By setting double crawler wheels and setting an equipment installation plate, a multi-degree-of-freedom arm is installed on the equipment installation plate, and emergency grippers and image acquisition equipment are installed on the front end of the multi-degree-of-freedom arm. Double-rotor propellers are installed at the four corners of the disc, equipped with direction sensors, control modules, information processing modules, and information interaction modules, so that the land-air cruise robot can operate on various grounds or fly in the air; the multi-degree-of-freedom arm cooperates with the emergency gripper installed on the front end and image acquisition equipment, which can realize the emergency treatment of the inspection robot in various situations outdoors and the comprehe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com