Orthopedic surgery device and orthopedic surgery robot system
A technology of orthopedic surgery and clamping mechanism, which is applied in the field of medical equipment, can solve the problems of high workload and insufficient intelligence of doctors, and achieve the effect of simple and easy operation, improved control precision and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment 3
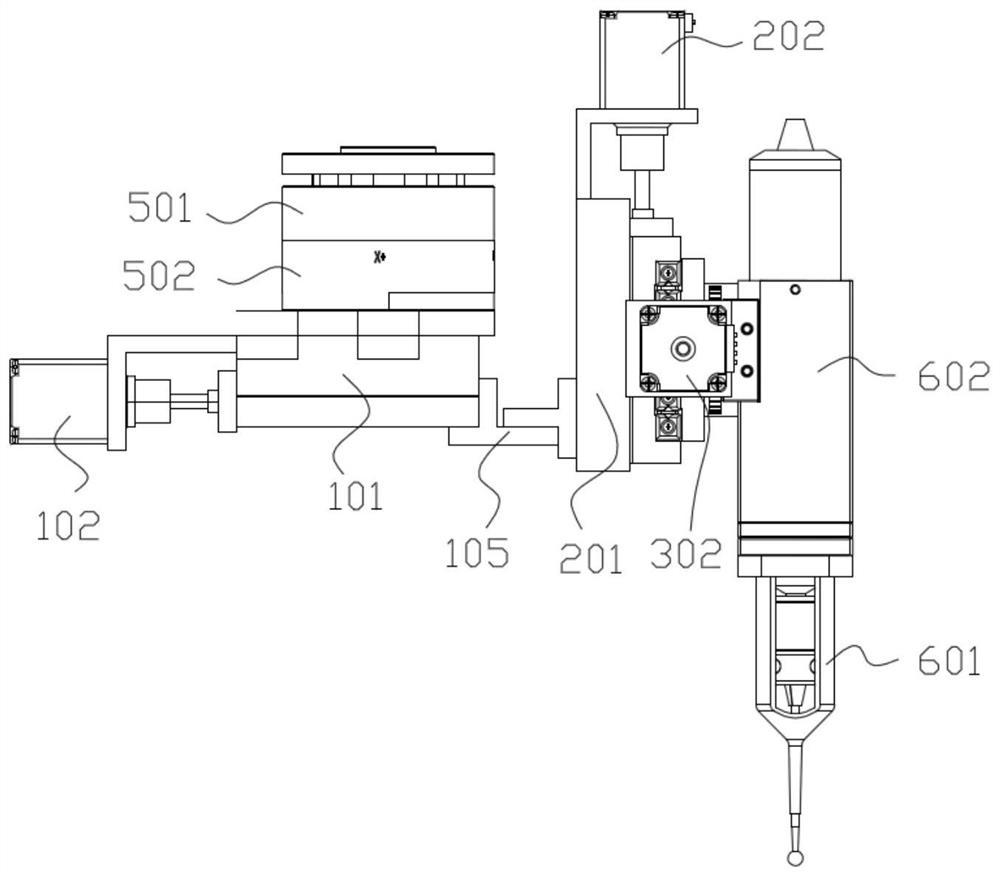
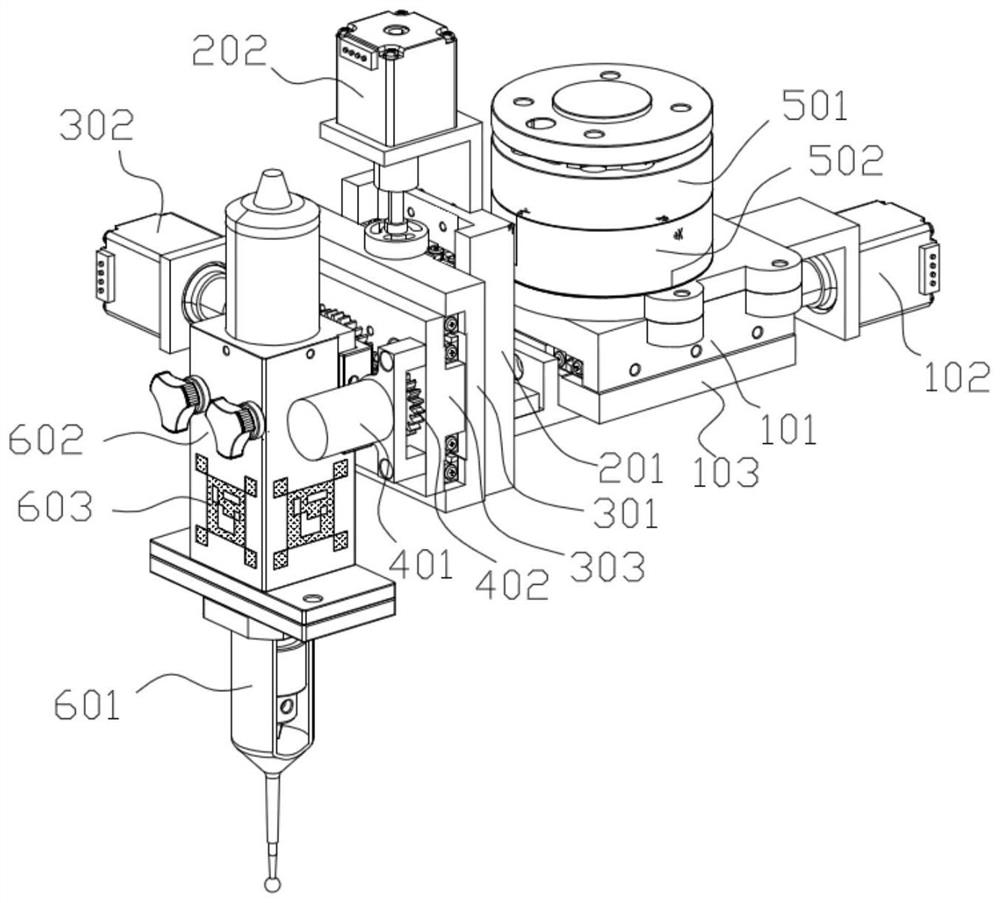
[0083] In the third embodiment, the two moving mechanisms are respectively a lateral moving mechanism 320 and a depth moving mechanism 220 , which respectively provide linear reciprocating movement variables along the lateral direction and the depth direction. exist Figure 7 Among the coordinate axes, X is the horizontal direction, Y is the vertical direction, and Z is the depth direction. The linear reciprocating movement variables in the lateral and depth directions are superimposed, allowing the orthopedic surgical tool to reach any point within a certain plane range, thereby realizing convenient, simple, high-precision, and stable surgical operations of the orthopedic surgical tool, and It can improve the operation efficiency and reduce the operation risk.
[0084] The lateral movement mechanism 320 includes a lateral drive motor 322, a lateral slide rail mount 321 and a lateral movement platform 325 on which a lateral slide rail is installed, and the lateral movement me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com