A method and system for AGV path planning based on reinforcement learning
A technology of path planning and reinforcement learning, applied in control/adjustment system, two-dimensional position/course control, vehicle position/route/height control, etc., can solve the problems of large time consumption and computing power cost, and achieve computing power Effects with low requirements and high generalizability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
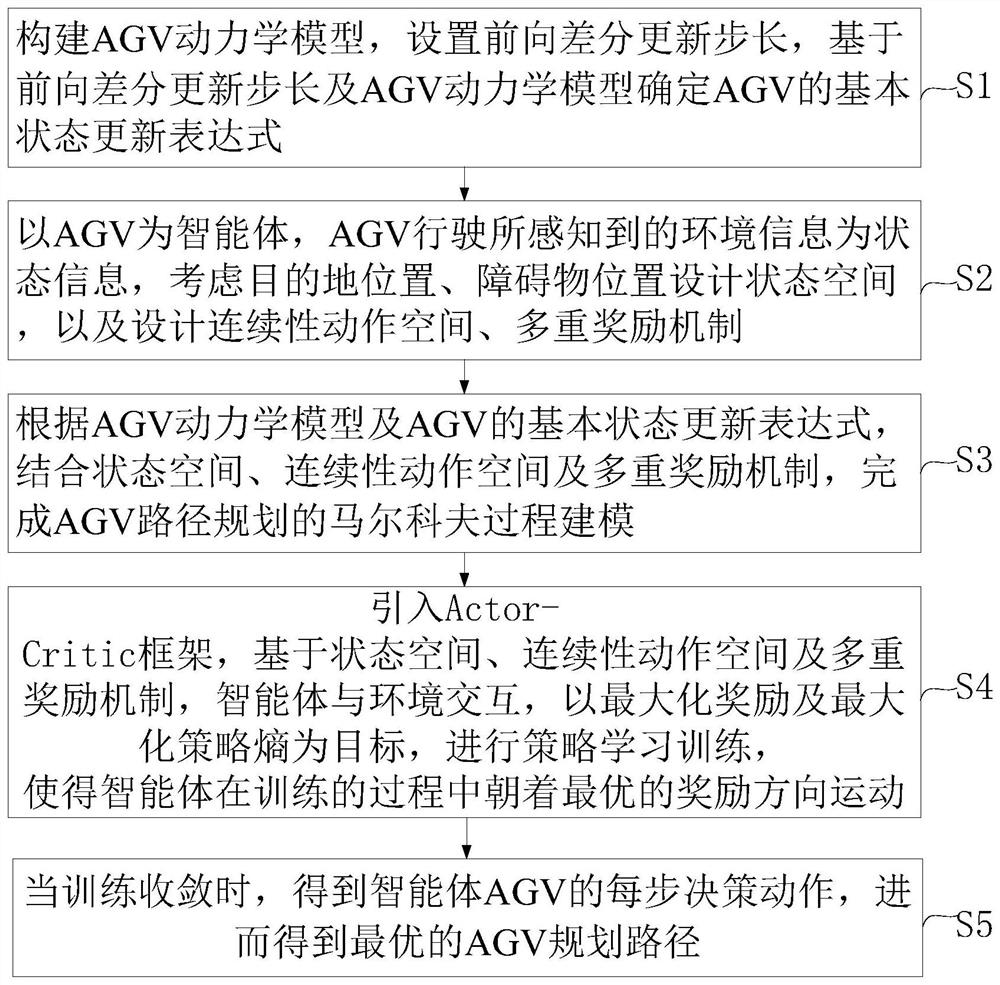
[0091] like figure 1 As shown, in this embodiment, a schematic flowchart of an AGV path planning method based on reinforcement learning is proposed, see figure 1 , the method includes:
[0092] S1. Build the AGV dynamics model, set the forward differential update step size, and determine the basic state update expression of the AGV based on the forward differential update step size and the AGV dynamics model;
[0093] Considering that reinforcement learning depends on the interaction between the agent and the environment, in multiple trials and errors, combined with a reasonable reward mechanism, the strategy learning of the current scene is carried out. When the training converges (generally refers to the entire trajectory of each AGV interaction with the environment) The obtained reward value converges), but the interaction data is directly collected in the real environment, and the loss to the AGV is relatively large. Therefore, a simulation model that can reflect the stat...
Embodiment 2
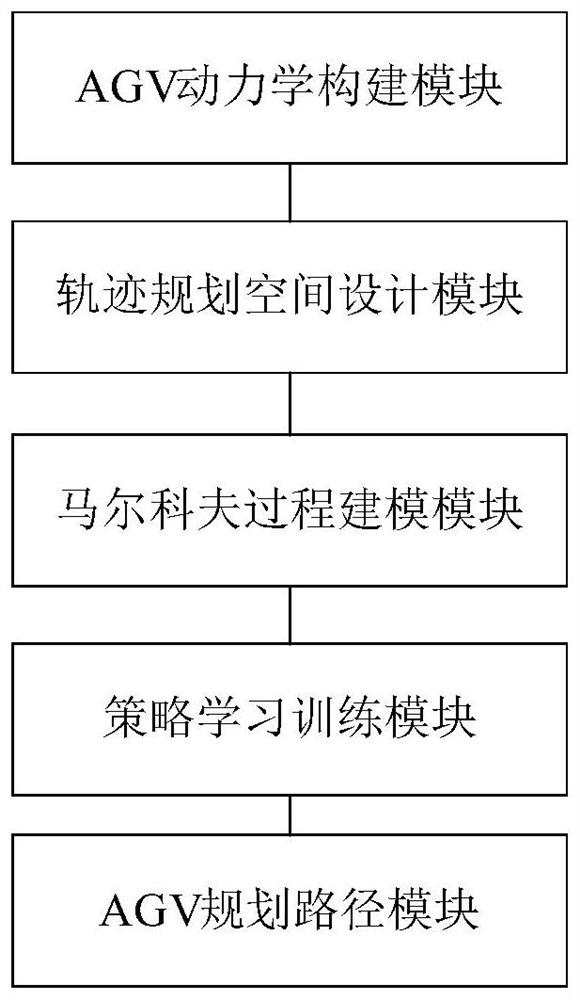
[0197] like image 3 As shown, the present application also proposes an AGV path planning system based on reinforcement learning, the system is used to implement the AGV path planning method, see image 3 , the system includes:
[0198] The AGV dynamics building module is used to build the AGV dynamics model, set the forward differential update step size, and determine the basic state update expression of the AGV based on the forward differential update step size and the AGV dynamics model;
[0199] The trajectory planning space design module takes the AGV as the intelligent body, the environmental information perceived by the AGV as the state information, considers the destination location and the obstacle location to design the state space, and designs the continuous action space and multiple reward mechanisms;
[0200] The Markov process modeling module, according to the AGV dynamics model and the AGV's basic state update expression, combined with the state space, continuo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com