Improved AMCL positioning method based on semantic map with wall corner information and robot
A semantic map and positioning method technology, applied in the field of robotics, can solve problems such as convergence failure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
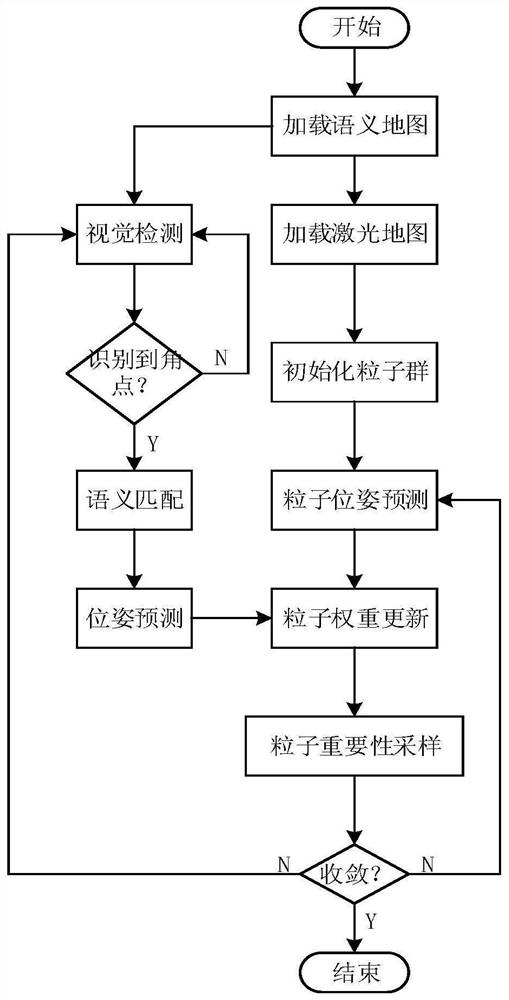
[0024] The present invention aims at the problem that the AMCL positioning algorithm is prone to positioning failure in some scenarios, and proposes an improved AMCL positioning method based on a semantic map with corner information, and uses a deep learning model (including but not limited to the SSD model) for object recognition and detection during the positioning process , to identify and extract the semantic information of the corner and other objects around the environment, and construct the corner information lookup table by extracting the semantic position relationship of the object during the positioning process, and use the semantic map with the corner information to realize the visual pre-positioning first, so that the robot can be in the In the case of a small amount of prior information and motion, the initial positioning can be realized more quickly, combined with the AMCL algorithm and the environment map matching, the particle weight update method is improved, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com