A path planning method for hyper-redundant manipulators
A technology of path planning and manipulators, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc. It can solve problems such as unstable paths, large amount of algorithm calculations, and difficulty in obtaining paths that meet the conditions.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0055] The present invention will be further elaborated below in conjunction with the examples.
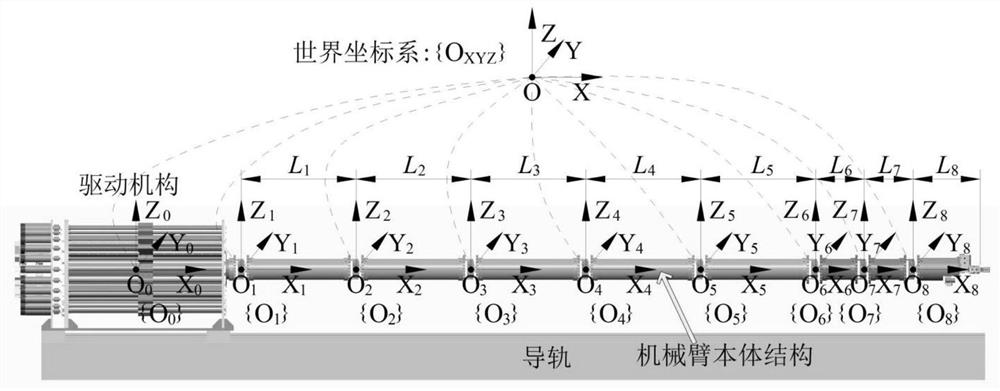
[0056] The present invention provides a path planning method for a hyper-redundant manipulator based on an improved RRT algorithm. In addition to being used for the path planning of a hyper-redundant manipulator, the method can also be applied to other moving objects (eg, unmanned vehicles). Autopilot of cars, autonomous planning of remote control aircraft, autonomous collision-free action of robots, etc.) path planning, so as to plan a path within a specified declination range. The algorithm flow chart is as follows figure 1 As shown in the figure, the kinematic model and obstacle model of the manipulator are firstly established, then the relationship between the parameters is theoretically analyzed, and finally the corresponding RRT algorithm is improved to obtain the corresponding MDA+RRT algorithm.
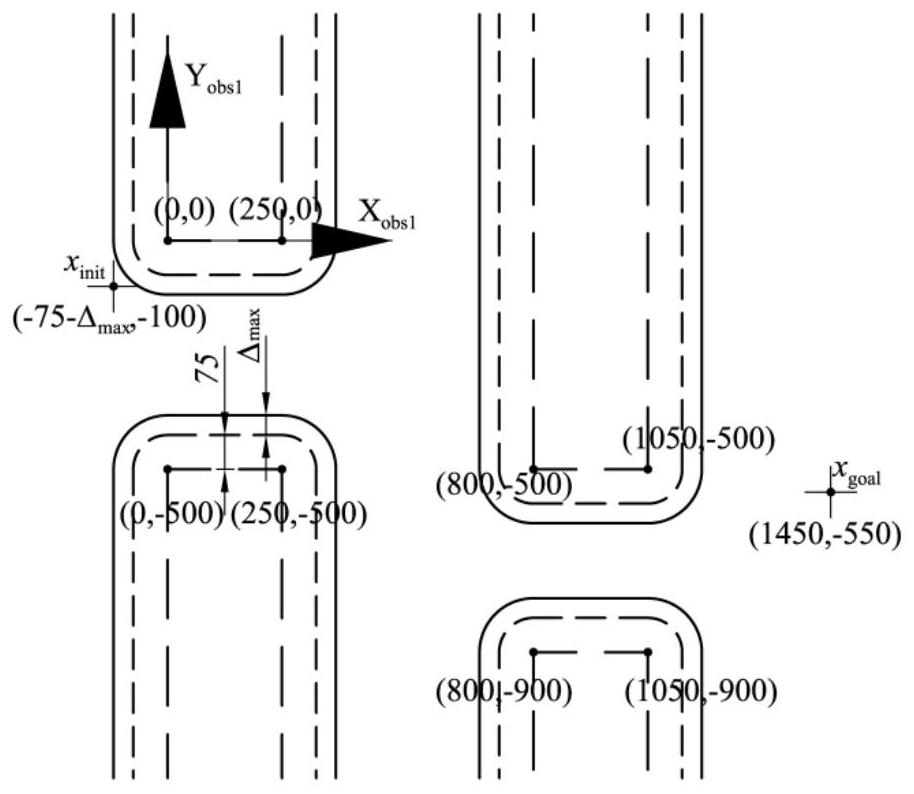
[0057] In this embodiment, the ranges of the three planning maps are set to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com