


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Unmanned driving demonstration device based on cross roads and control method thereof
An unmanned driving and demonstration device technology, applied in the field of teaching demonstration, can solve the problems of poor demonstration effect, poor course substitution, and low participation, achieve huge visual impact, ensure striking effect, and understand comprehensive effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
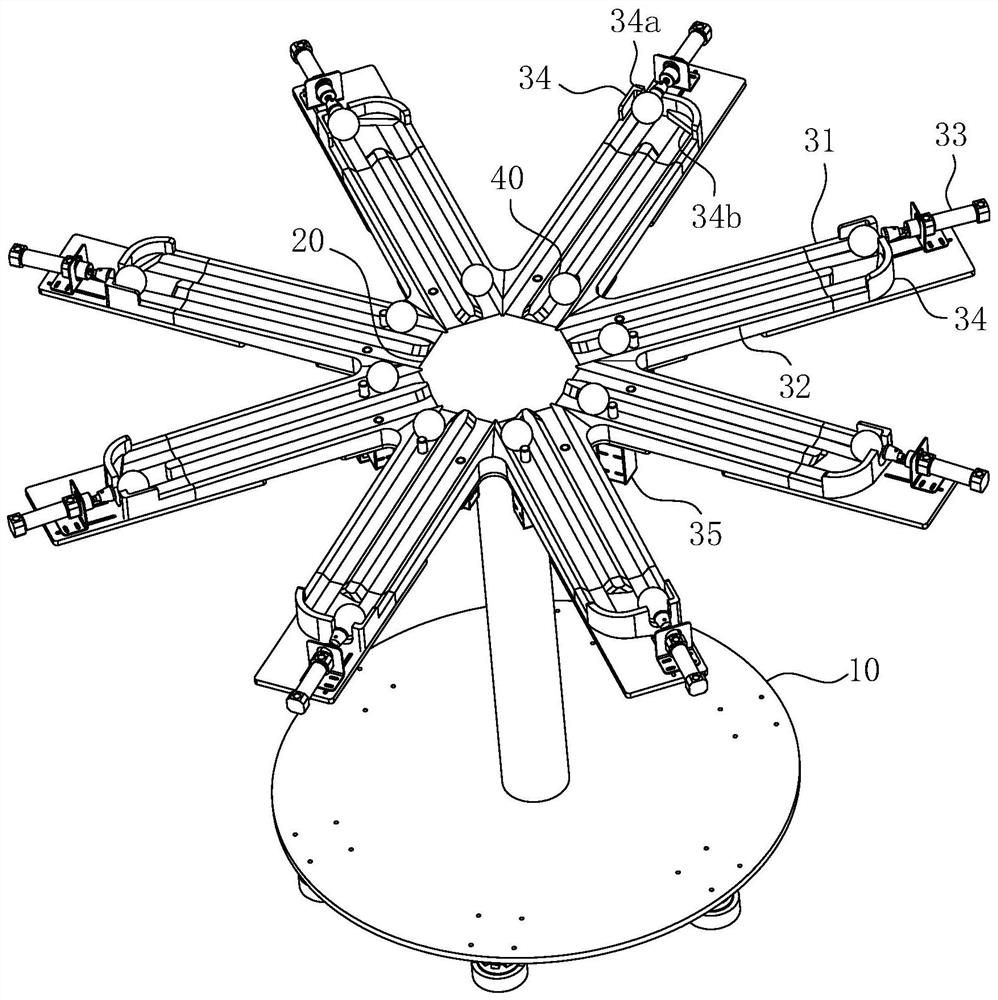
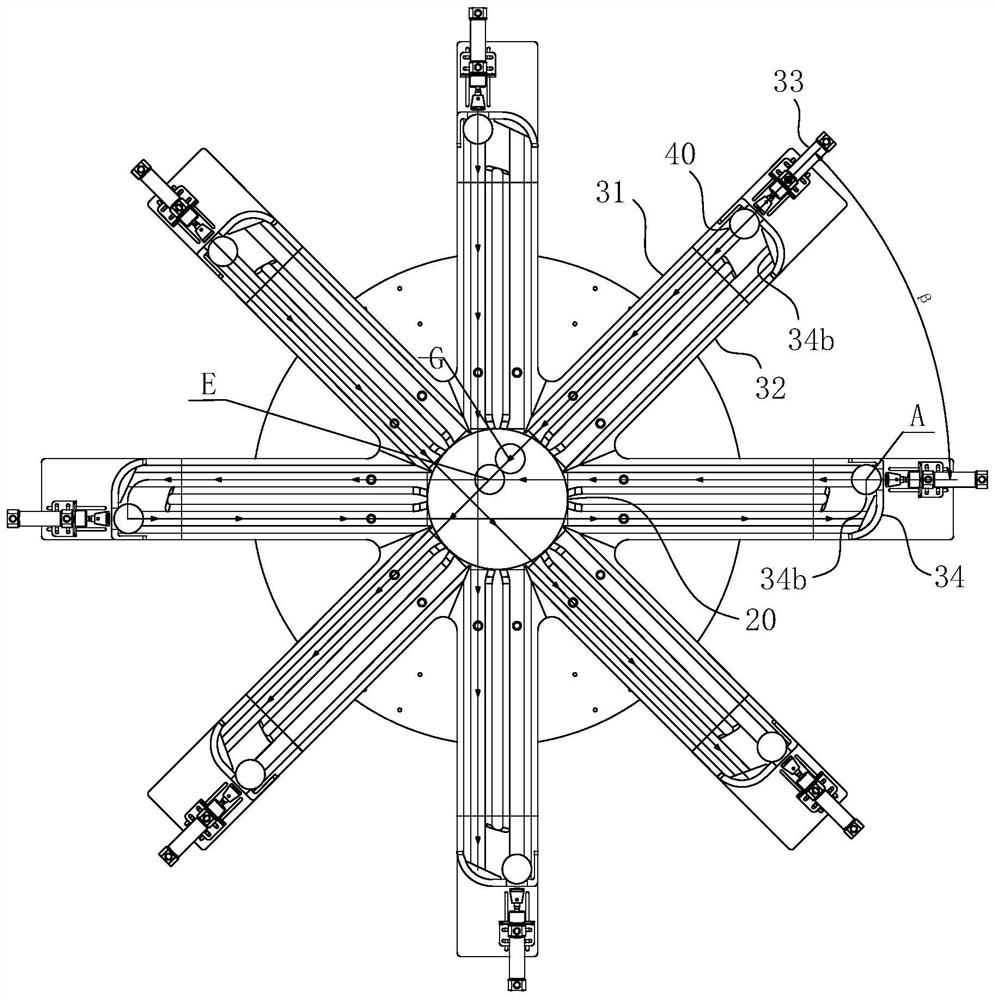
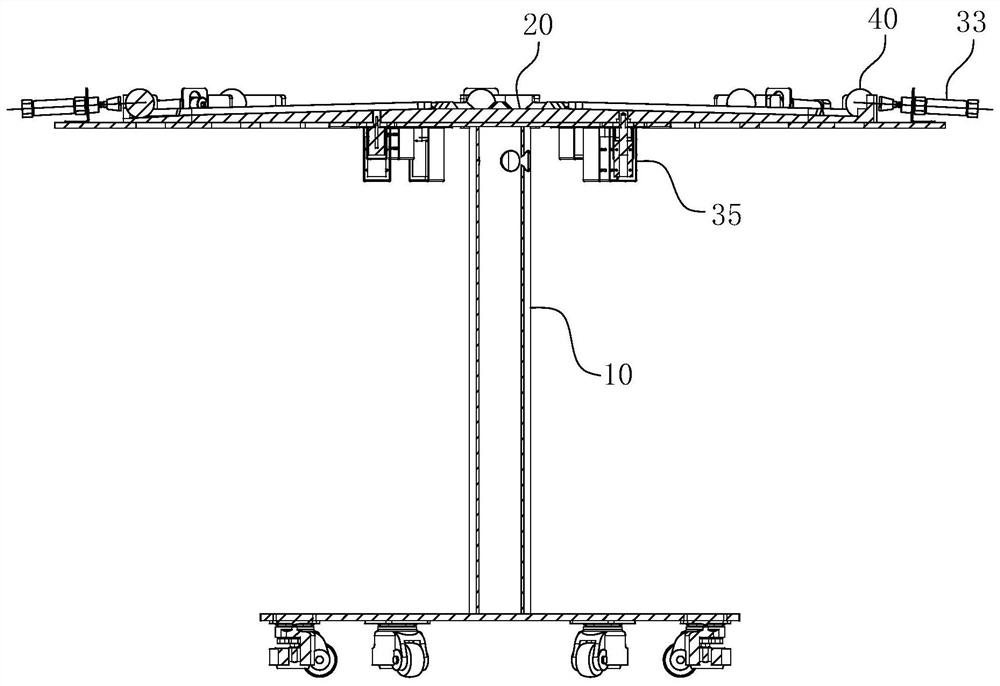
[0072] For ease of understanding, combined here Figure 1-6 , the concrete structure and working mode of the present invention are further described as follows:
[0073] The specific structure of the present invention is as Figure 1-3 As shown, its main structure includes a base 10 , an intermediate meeting platform 20 located on the base 10 , and various sets of guide assemblies arranged on the outer periphery of the intermediate meeting platform 20 in a radially divergent shape. From Figure 1-2 It can be seen from the figure that each two groups of guide assemblies arranged axially symmetrically along the axis of the middle intersection platform 20 form a circulation channel for the sphere 40 to reciprocate, that is, form a set of linear demonstration units; the sphere 40 demonstrates along a set of straight lines. The unit continuously produces striking and traveling actions from the guide groove 31 to the return groove 32 and then to the guide groove 31 , and the actio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com