Six-degree-of-freedom wearable lower limb exoskeleton rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in passive exercise equipment, equipment to help people walk, physical therapy and other directions, can solve the problems of increasing deviation rate and error rate of rehabilitation training, expensive training, short training time, etc. Guaranteed comfort, enhanced comfort and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described in detail below in conjunction with specific embodiments and accompanying drawings.
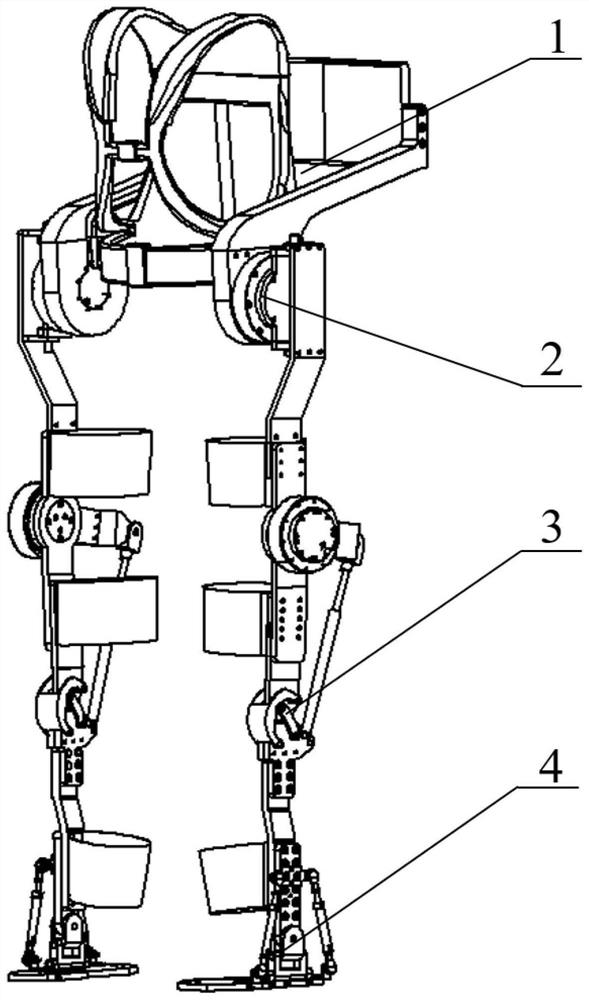
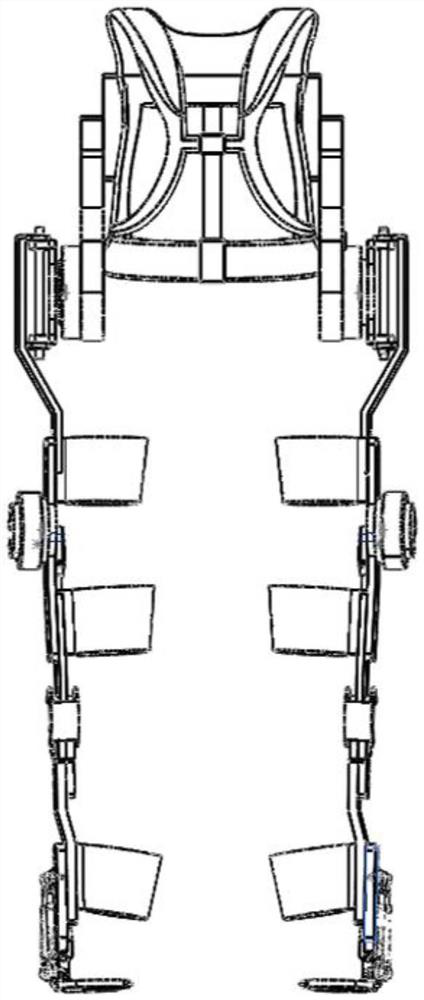
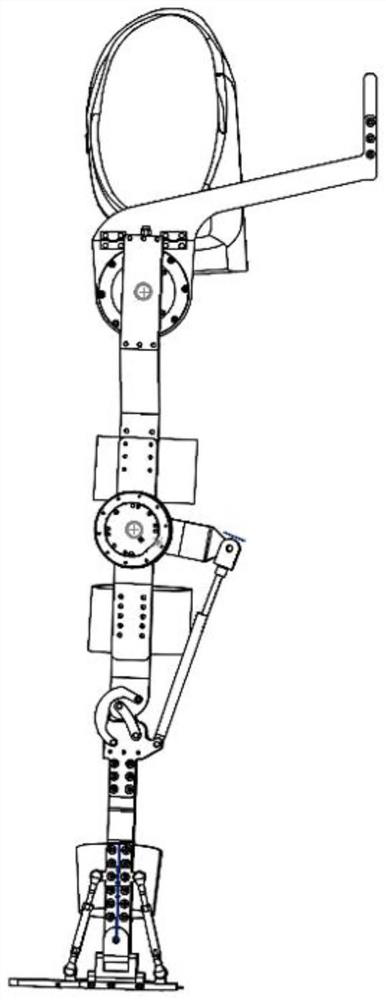
[0035] Such as Figure 1 to Figure 12 As shown, a six-degree-of-freedom wearable lower limb exoskeleton rehabilitation robot of the present invention includes a waist support mechanism 1 , a hip joint exoskeleton mechanism 2 , a knee joint exoskeleton mechanism 3 , and an ankle joint exoskeleton mechanism 4 . The six-degree-of-freedom wearable lower limb exoskeleton rehabilitation robot adopts a single six-degree-of-freedom design, which is three degrees of freedom for the hip joint exoskeleton, which can realize hip flexion / extension, adduction / abduction and internal rotation / external rotation Movement; one degree of freedom of the exoskeleton of the knee joint realizes the instantaneous center of rotation coaxial with the human knee joint, which corresponds to the flexion / extension movement of the knee joint; the two degrees of freedom ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com