A Calibration Method Based on Internal and External Parameters of Known Camera Position
A camera position and calibration method technology, applied in image data processing, image analysis, instruments, etc., can solve the problems of too many marker points, expensive acquisition of accurate marker points, multiple solutions, etc., and achieve the effect of fewer marker points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
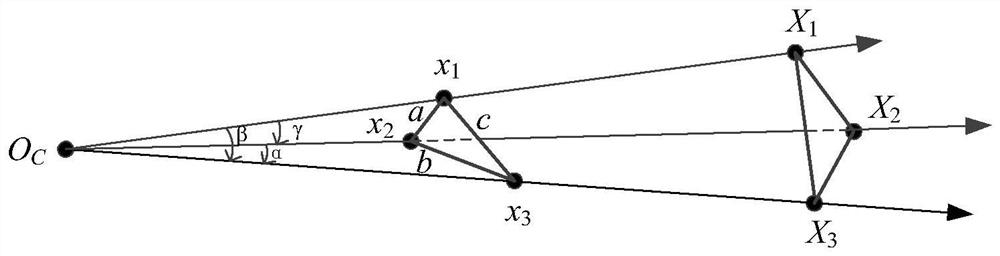
[0100] The present invention is illustrated by a case using the simulation method. Suppose the world coordinate system S w with the camera coordinate system S c Parallel, that is, the theoretical value of the rotation matrix in the external parameters is
[0101]
[0102] During simulation, set the three flag points as
[0103] X 1 =(-20 -10 200)
[0104] X 2 =(20 -10 200)
[0105] X 3 =(20 -5 200)
[0106] The camera position coordinates are
[0107] O c =(0 0 0)
[0108] The focal length of the lens is 50mm, the resolution is 1280×800, and the pixel size is 14μm. According to the pinhole imaging model, the pixel coordinates after imaging are obtained as
[0109] x 1 =(282.8571 221.4286)
[0110] x 2 =(997.1429 221.4286)
[0111] x 3 =(997.1429 310.7143)
[0112] According to the calibration method of internal and external parameters proposed by the present invention, we obtain
[0113]
[0114]
[0115]
[0116] After the focal length is normal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com