Adjustable foot end of leg-foot type robot
A robot and foot-end technology, applied in the field of robots, can solve problems such as easy slipping, low adhesion, and poor environmental adaptability, and achieve the effects of convenient manipulation, reduced chance of slipping, and low replacement cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be described in detail below with reference to the accompanying drawings and examples.
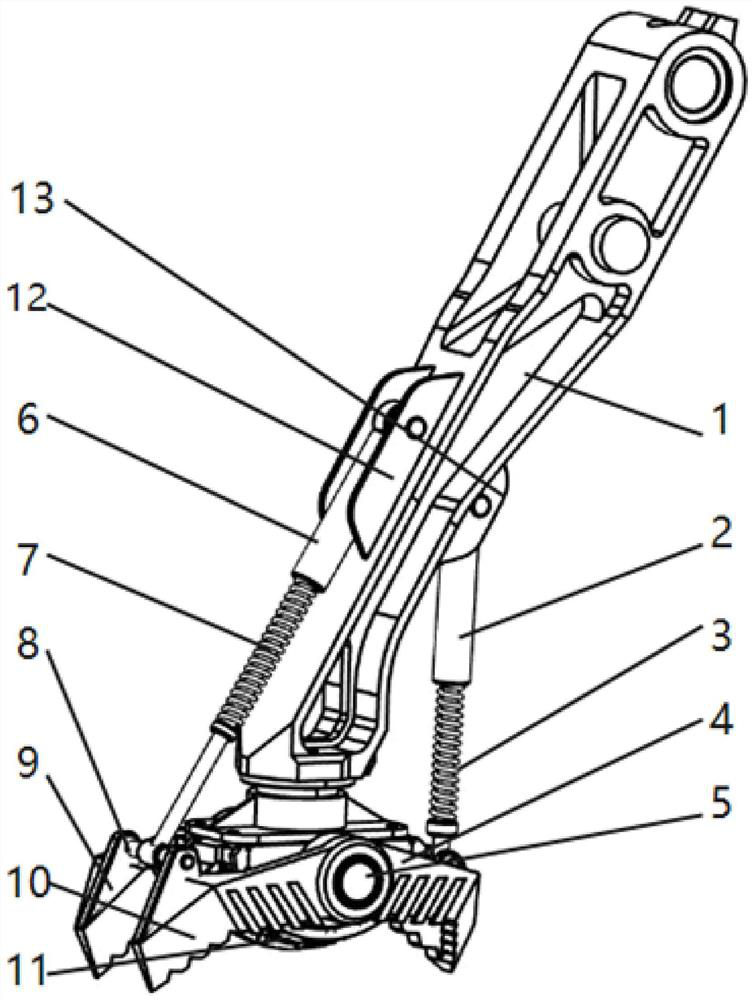
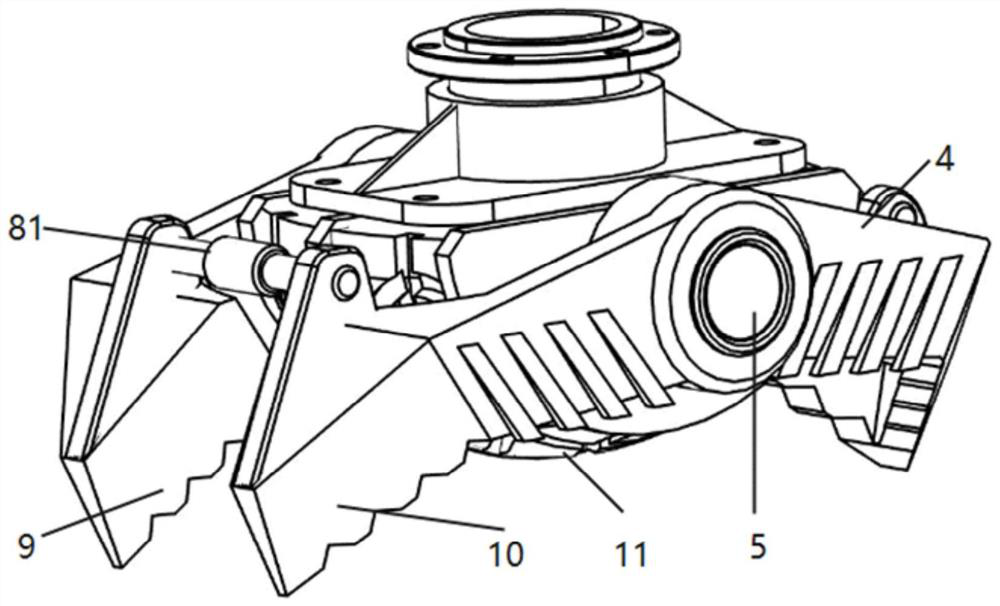
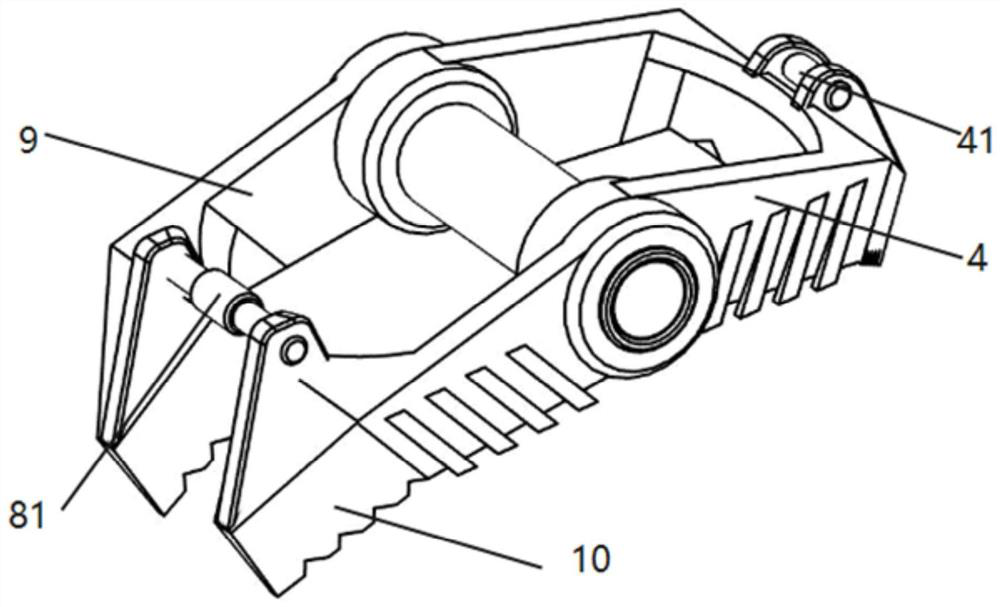
[0045] The invention provides an adjustable foot end of a legged robot, referring to figure 1 , the adjustable foot end includes sole 11, two front toes, one rear toe 4, front toe control push rod 6, rear toe control push rod 2, buffer spring and front toe connecting rod 8; sole 11 is installed At the bottom of the robot lower leg 1, the foot 11 can be cylindrical or spherical; for the convenience of explanation, the side in front of the robot when the robot advances is defined as the front side of the robot lower leg 1, and the side behind the robot is defined as the robot lower leg 1, the end of the front toe away from the rear toe 4 is the front end of the front toe, and the end facing the rear toe 4 is the rear end of the front toe, and the end of the rear toe 4 away from the front toe is the rear end of the rear toe 4 The rear end and the end towards...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com