Mechanical arm for minimally invasive surgery robot
A technique of surgical robot and minimally invasive surgery, which is applied in the field of minimally invasive surgical robots to achieve high applicability and high flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
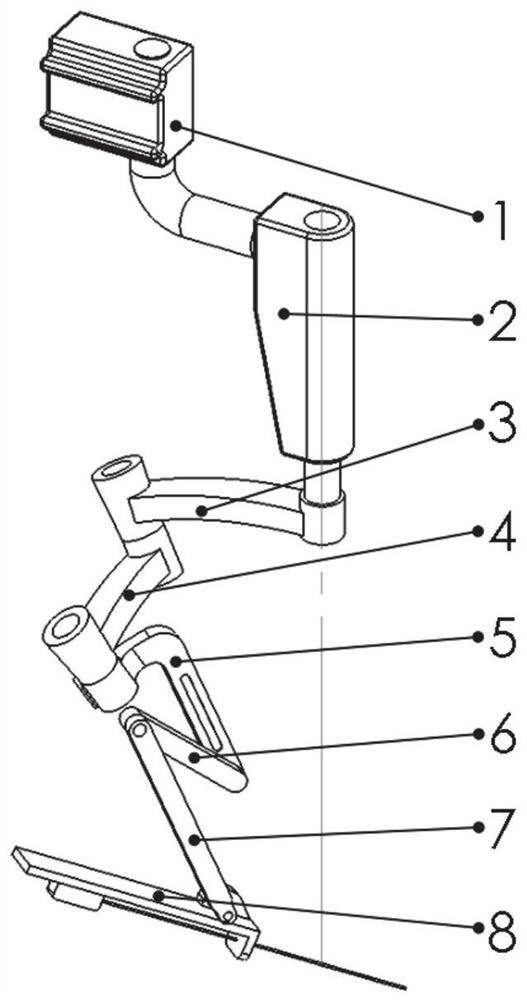
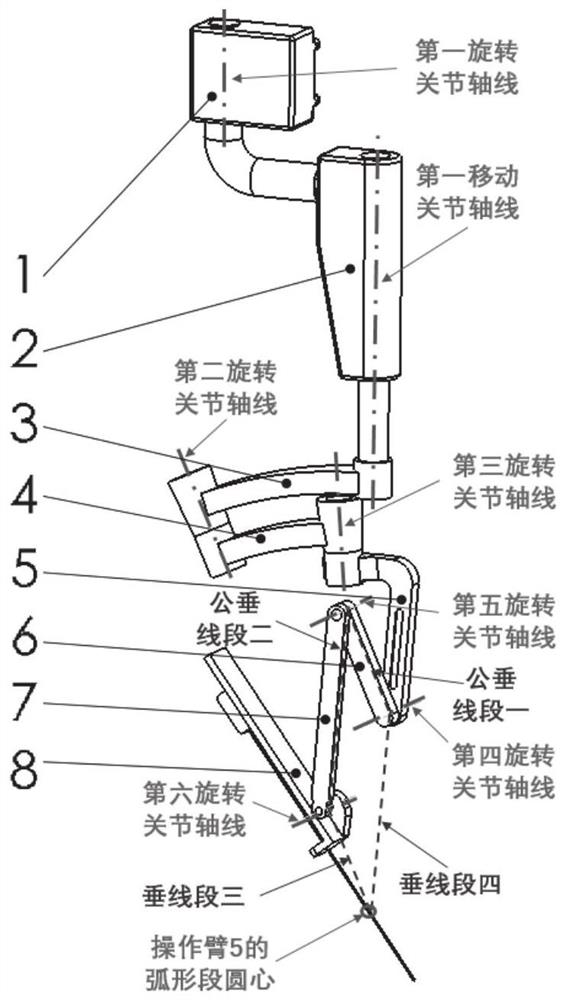
[0025] A typical embodiment of the application 1 such as figure 1 As shown, it discloses a schematic diagram of the installation layout of the mechanical arm layout structure of the minimally invasive surgical robot in the non-working state, which includes the operating arm I1, the operating arm II2, the operating arm III3, the operating arm IV4, the operating arm V5, the operating arm Arm VI6, operating arm VII7 and connecting seat 8; Each of the above-mentioned structures is described in detail below:
[0026] The operating arm 1 is installed on the supporting device of the entire mechanical arm structure. According to different working scenarios, the supporting device can be floor type, hanging type, etc., and the connecting joint between the operating arm 1 and the supporting device can be mobile, rotating or Stationary.
[0027] In this embodiment, the operating arm I1 is connected to the vertically arranged operating arm II2 through the first rotary joint; the operating...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com