Method for improving Doppler tolerance of slow time phase coded signal of sky wave radar
A technology of phase encoding signal and Doppler tolerance, applied in the field of radar communication, can solve the problem of low Doppler tolerance, achieve the effect of expanding application, reducing Doppler ambiguity, and reducing target detection ambiguity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
specific Embodiment approach 1
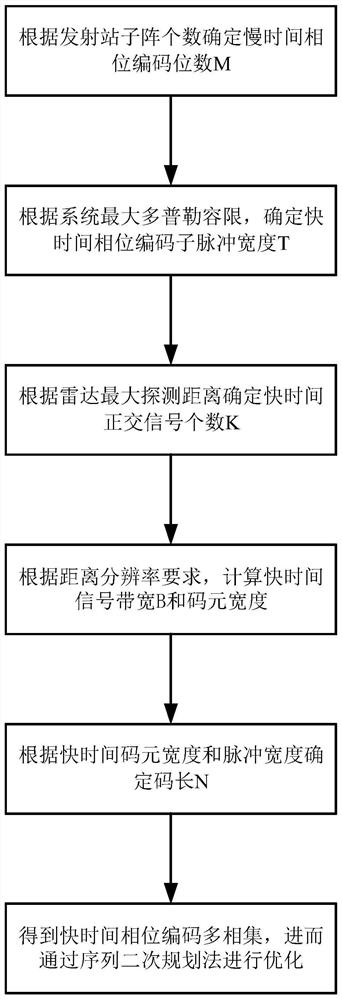
[0045] Specific implementation mode 1: In this implementation mode, a method for improving the Doppler tolerance of sky-wave radar slow-time phase encoding signal The specific process is as follows:
[0046] For sky-wave MIMO radar, use orthogonal coding to improve the Doppler tolerance of LFMCW slow-time phase-coded signals, alleviate the contradiction between the maximum unambiguous range and maximum unambiguous velocity, and use sequence quadratic programming to optimize fast-time coded signals Make it have better autocorrelation and cross-correlation properties.
[0047] Step 1: Assuming that the sky-wave MIMO radar transmitting station has M transmitting array elements, during the entire coherent accumulation time, the signals of N detection periods are coherently accumulated, and the N detection period signals constitute a set of slow time phase encoding signals, then the first The signals transmitted by the m transmitting array elements are:
[0048]
[0049] Wherei...
specific Embodiment approach 2
[0060] Specific embodiment two: the difference between this embodiment and specific embodiment one is: in the step 3, according to the maximum Doppler tolerance required by the sky-wave MIMO radar, the pulse width T of the fast time phase encoding signal is determined; the specific process is:
[0061] According to the maximum unambiguous velocity v max =±λ / 4MT, get the maximum Doppler tolerance f d The relationship with the pulse width T of the fast time phase encoding signal:
[0062]
[0063] get
[0064]
[0065] Where λ is the signal wavelength.
[0066] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
[0067] Specific embodiment three: the difference between this embodiment and specific embodiment one or two is that in the step 4, the number of fast time quadrature signals is calculated according to the pulse width T of the fast time phase encoding signal; the specific process is:
[0068] The pulse width of the fast time phase encoding signal is T, and the maximum unambiguous detection distance of the LFMCW slow time phase encoding signal is:
[0069] R max =cT / 2
[0070] After replacing the LFMCW signal with the quadrature phase coded signal, select K mutually orthogonal signals in a fast time, so that the maximum unambiguous detection distance of the radar meets the detection requirements of the sky-wave MIMO radar;
[0071] K=2R max / cT
[0072] where c is the speed of light, and the size is 3×10 8 m / s; K represents the number of fast time quadrature signals, that is, s 1 ,s 2 ,...,s K Orthogonal to each other, as shown in Figure 2.
[0073] Other steps and param...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com