Supervised non-contact mechanical arm demonstration method
A teaching method and technology of manipulators, applied in manipulators, program-controlled manipulators, claw arms, etc., can solve problems such as inability to fully simulate application scenarios
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
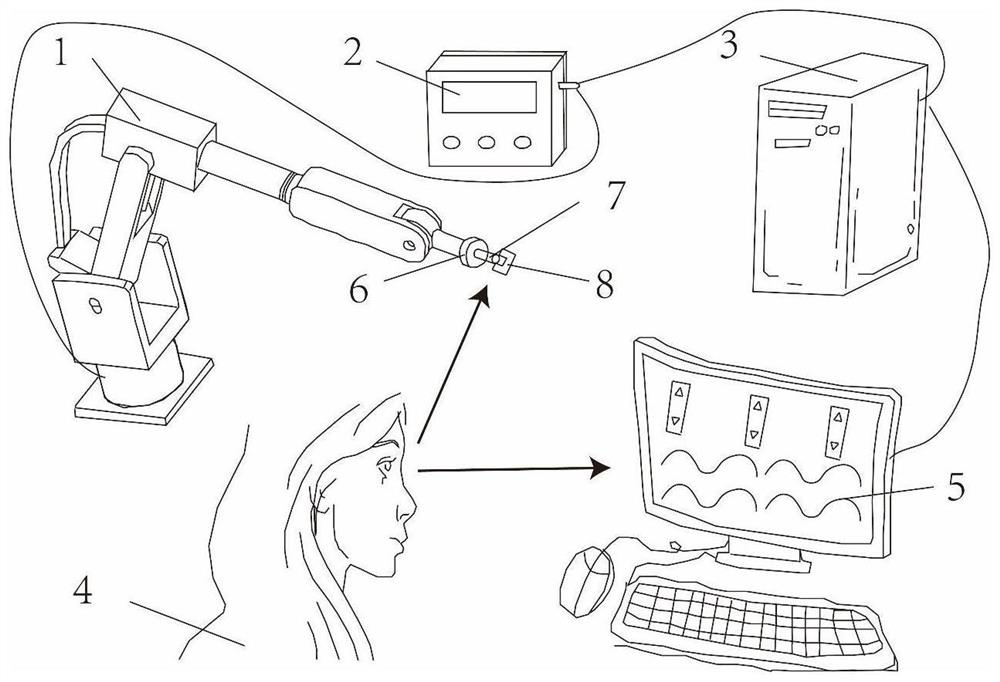
[0023] Such as figure 1 As shown, a supervised non-contact manipulator teaching method, including a manipulator 1, a robot controller 2, a teleoperation computer 3, a teacher 4, a display 5, a six-dimensional force / torque sensor 6, and the end of the manipulator Tool 7, operated object 8. In the teleoperation computer, those skilled in the art can design a program to observe and record the force data and send instructions to the robot controller according to the existing conventional method. The teacher 4 sends the motion command of the end of the manipulator to the robot controller 2 through the remote operation computer 3 and display 5, and observes the relative pose relationship between the tool 7 at the end of the manipulator and the object 8 to be operated while sending the command. And the force signal collected by the six-dimensional force / torque sensor 6 displayed on the display 5 . The teacher 4 completes the teaching process of the contact operation task by observi...
Embodiment 2
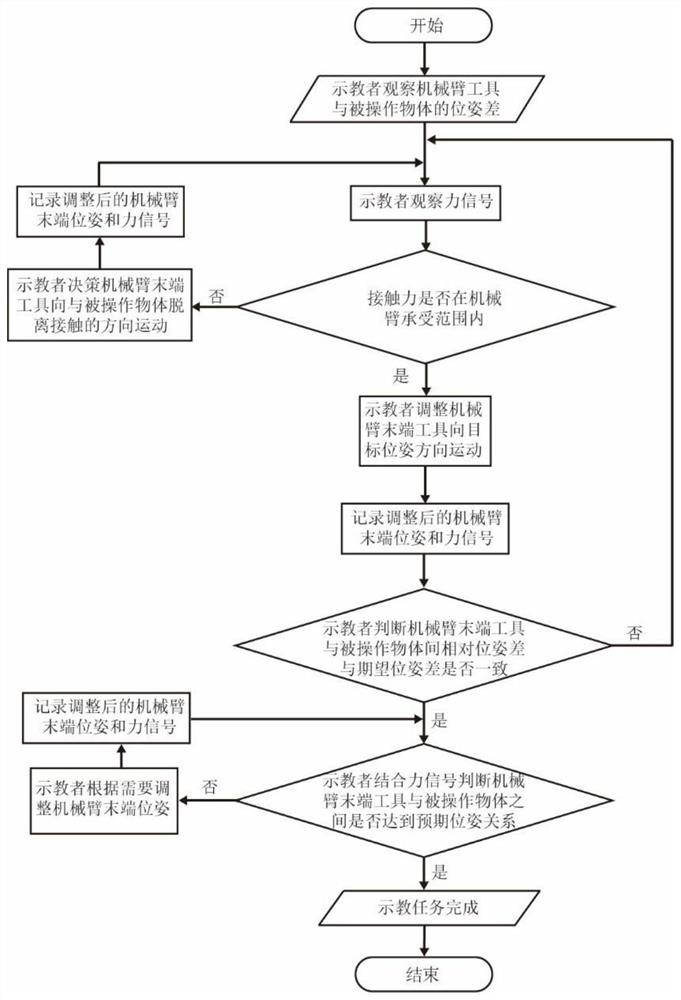
[0025] A supervised non-contact teaching method of a mechanical arm, the method steps are as follows:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com