Traveling route generation device and vehicle control device
A technology of vehicle control device and driving path, which is applied in the traffic control system of road vehicles, vehicle position/route/height control, vehicle components, etc., and can solve the problems of deterioration of ride comfort, uneven precision, and unsmooth driving Path and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0037]
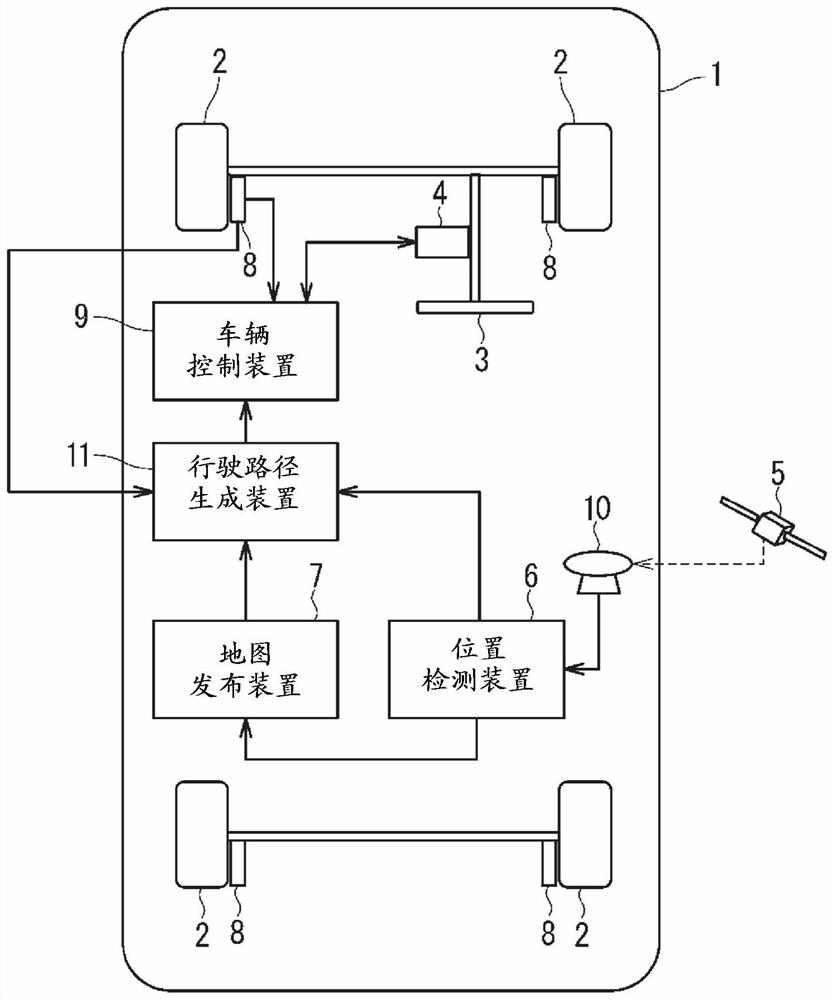
[0038] figure 1 It is a diagram showing the overall configuration of a vehicle system including the travel route generation device 11 according to Embodiment 1 of the present invention.
[0039] Such as figure 1 As shown, the vehicle system is applied to a vehicle 1 provided with wheels 2 and a steering wheel 3, and includes a steering device 4, an antenna 10, a position detection device 6, a map distribution device 7, a vehicle speed sensor 8, a vehicle control device 9, a driving route generation device 11, and a yaw rate sensor not shown.
[0040] It should be noted that, in figure 1 In this embodiment, the position detection device 6 and the map distribution device 7 are configured independently, but they may also be configured integrally. Furthermore, the travel route generation device 11 and the vehicle control device 9 are configured independently, but they may also be configured integrally.
[0041] The steering device 4 is composed of, for example, an E...
Embodiment approach 2
[0098] In Embodiment 1, the case where the weight of the control reference point Pref is set to be greater than the weight of other points ahead of the vehicle 1 has been described. In Embodiment 2 of the present invention, it is described that the control reference point Pref is the center of gravity position of the vehicle 1, and the travel route generation device 11 calculates the tangent and curvature of the travel route at the control reference point Pref, and the vehicle control device 9 calculates the tangent and curvature of the travel route at the control reference point Pref. The case where the command steering angle θref is calculated based on the tangent and curvature of the traveling path. It should be noted that the configurations of the vehicle 1 , travel route generation device 11 , and vehicle control device 9 in the second embodiment are the same as those in the first embodiment, and therefore detailed descriptions are omitted here.
[0099]
[0100]
[0...
Embodiment approach 3
[0126]In Embodiments 1 and 2, the case where the control reference point Pref is a point in front of the vehicle 1 or the center of gravity of the vehicle 1 has been described. In Embodiment 3 of the present invention, a case where there are a plurality of control reference points Pref will be described. It should be noted that the configurations of the vehicle 1 , travel route generation device 11 , and vehicle control device 9 in the third embodiment are the same as those in the first embodiment, and therefore detailed descriptions thereof are omitted here.
[0127] Specifically, the steering control of the vehicle 1 uses model predictive control. In model predictive control, a dynamic vehicle model that mathematically represents the dynamics of the vehicle is used to predict the state from the current time t to Th, and solve the optimization problem at regular intervals, thereby calculating the optimal command steering angle θref, where the optimization problem is a proble...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com