Cooperative adaptive cruise control method for lane changing scene
A technology of adaptive cruising and control methods, applied in the design field of advanced assisted driving systems, can solve problems such as inapplicable convoy lane-changing cruising scenarios, and achieve the effects of ensuring asymptotic stability, queuing stability, and tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] A cooperative adaptive cruise control method with a lane-changing auxiliary function proposed by the present invention comprises the following steps: Step 1: The pilot vehicle establishes a lane-changing trajectory function with obstacle avoidance capabilities according to the state before and after the vehicle lane-changing and critical collision conditions; Two: The pilot vehicle calculates the optimal lane-changing trajectory of the vehicle under critical collision conditions according to the speed of the vehicle and the front vehicle, the geometric parameters of the vehicle body, and the road parameters; Step 3: Design a distributed model predictive control method to control the optimal fleet tracking plan Track driving.
[0068] 1) Establish a lane-changing trajectory function with obstacle avoidance ability
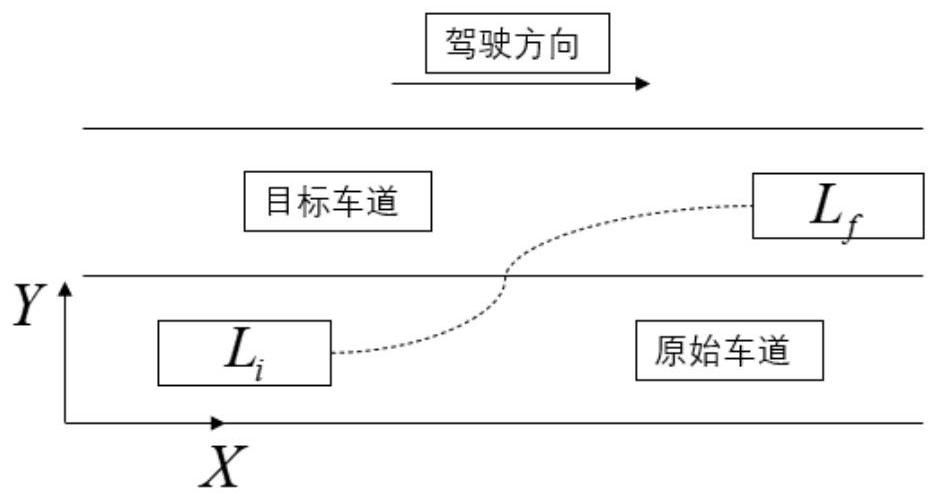
[0069] attached figure 1 Shown is a schematic diagram of vehicle barrier-free lane change
[0070] L i and L f are the states at the start and end moment...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com