Grouping consistency unmanned aerial vehicle formation control method considering time-varying formation
A control method and technology for UAVs, applied in the field of UAVs, can solve problems such as inability to maintain control in formation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
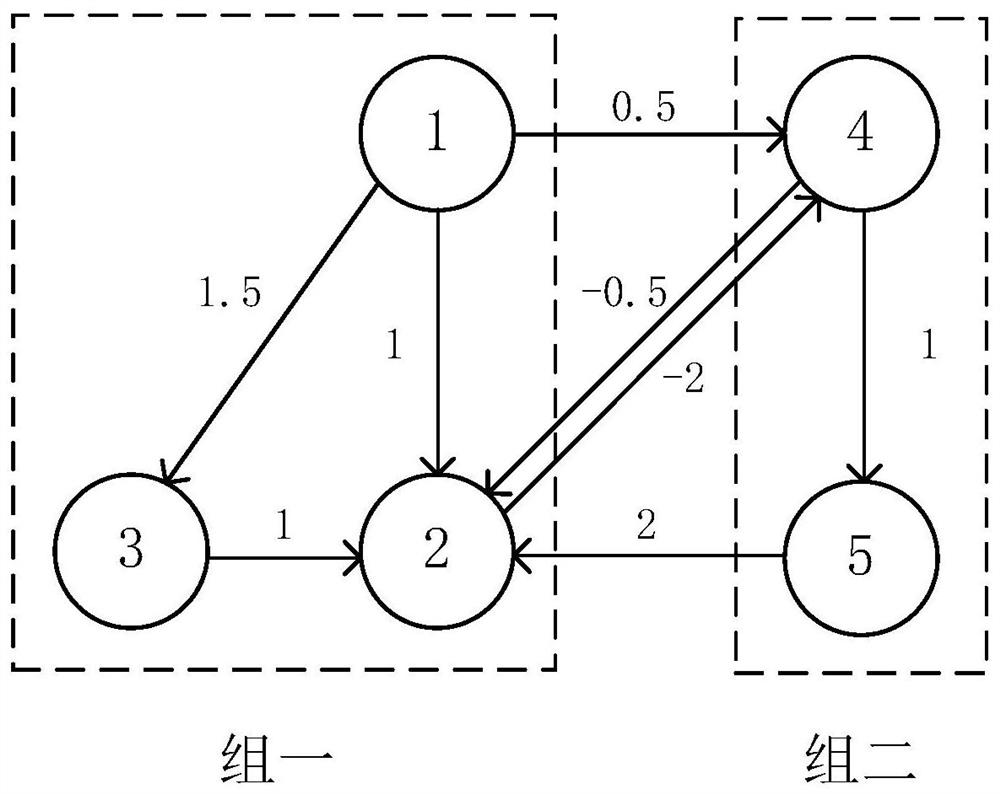
[0131] Based on attached figure 2 The topological structure is simulated and verified. There are 5 drones participating in the simulation, which are divided into two groups: the first group is three, numbered 1, 2, 3; the second group is two, numbered 4, 5. The corresponding adjacency matrix is as follows:
[0132]
[0133] The Laplacian matrix is:
[0134]
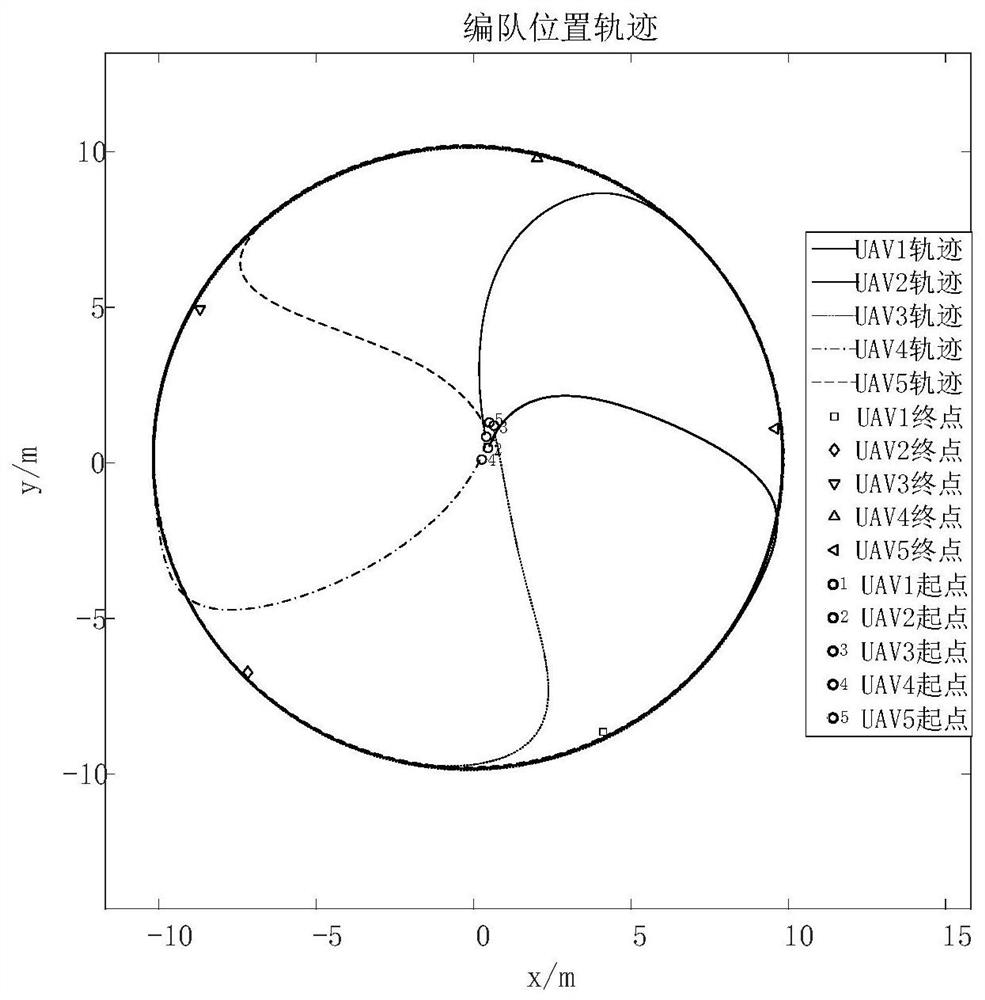
[0135] The time-varying formation is attached Figure 5 And attached Figure 6 are the position and velocity trajectories of the time-varying formation function during formation flight simulation, respectively.
[0136] The controller parameter is K=[k 1 ,k 2 ] = [0.8156, 1.4127].
[0137] The initial state of the UAV formation is:
[0138]
[0139] combined with figure 2 The topology shown above and the initial state settings above, the simulation results are shown in the attached image 3 , attached Figure 4 And attached Figure 7 shown.
[0140] From attached image 3 And attached Figure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com