Unmanned aerial vehicle soil fixed-point automatic sampling system
An automatic sampling and unmanned aerial vehicle technology, applied in the direction of motor vehicles, control/regulation systems, sampling devices, etc., can solve the problem of inaccurate sampling distribution, reduce the difficulty of sampling and improve the effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
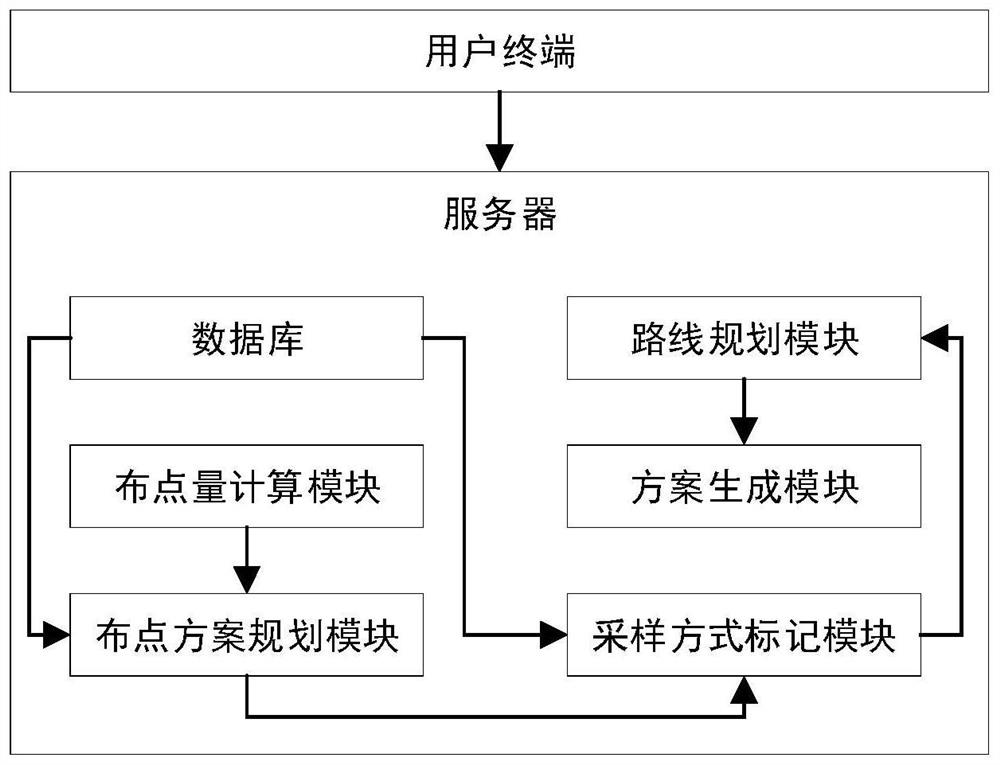
[0025] UAV soil fixed-point automatic sampling system, as attached figure 1 As shown, it includes a user terminal and a server, and the server includes a database, a point layout calculation module, a point layout scheme planning module, a sampling mode marking module, a route planning module and a scheme generation module. The database is preset with industrial distribution maps, mapping tables of land use and sampling methods, and various distribution methods. The mapping table of land use mode and sampling mode is used to establish the association between land use mode and sampling mode. Point layout methods include diagonal point layout, S-shaped point layout, and checkerboard point layout. For example, diagonal point layout is to make a diagonal line in the divided area, and set equidistant settings on the diagonal according to the amount of points to be placed to complete the point layout. The industrial distribution map is used to reflect the land use mode in each area...
Embodiment 2
[0033] The differences between this embodiment and Embodiment 1 are:
[0034] Maps are also preset in the database, and the route planning module is also used to generate walking routes corresponding to sampling methods according to the selected sampling points and the preset map, and generate corresponding walking routes for all sampling methods in turn. The scheme generation module is used to generate a sampling scheme according to the sampling route and the walking route, and send the sampling scheme to the user terminal. At this time, the generated sampling scheme includes the sampling route corresponding to each sampling mode, the walking route and the sampling coordinates of the sampling points. The user terminal is used to receive and display the sampling plan. For the sampling points where the soil sampling drone cannot sample, the user can arrange the grassroots sampling personnel to conduct artificial sampling, and guide the grassroots sampling personnel to the sampli...
Embodiment 3
[0036] The difference between this embodiment and Embodiment 1 is that in this embodiment, a sampling terminal is used for automatic soil sampling, thereby improving the accuracy of sampling points.
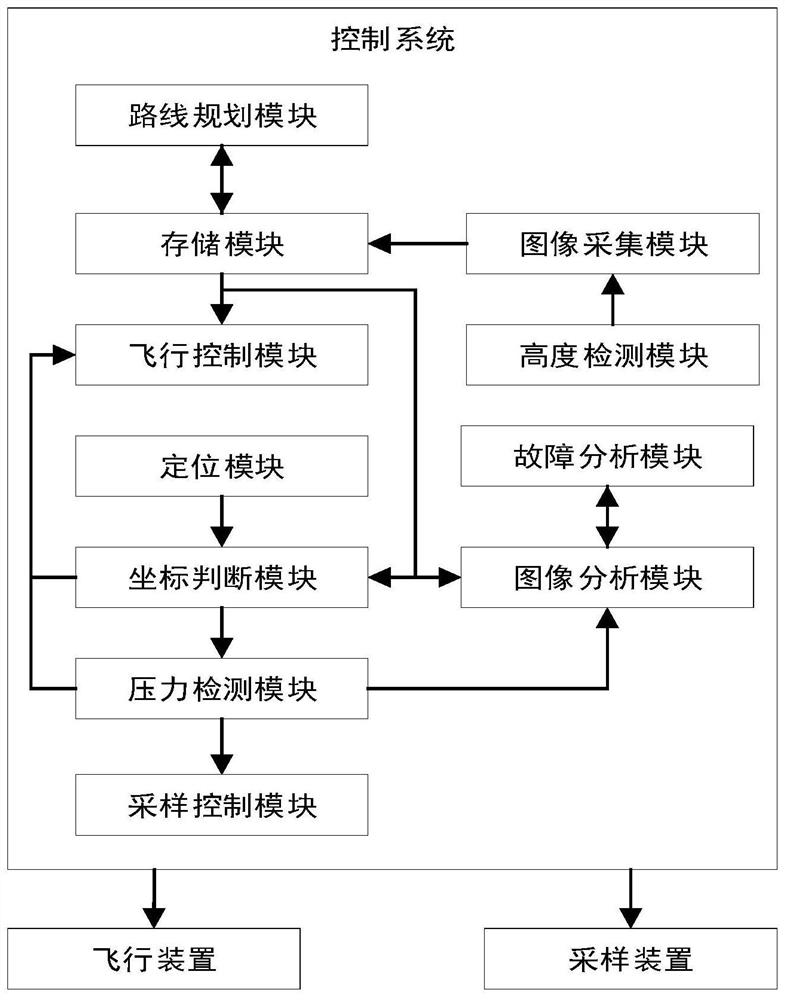
[0037] as attached figure 2 As shown, the sampling terminal includes a UAV, a sampling device and a control system. The sampling device is located under the UAV, and the sampling device is fixedly connected to the bottom of the UAV. In other embodiments, the sampling device is connected to the UAV. The bottom is detachably connected by screws or buckles, and different sampling devices can be installed under the drone according to different sampling methods, so as to realize automatic sampling according to different land use methods and sampling purposes. The sampling device adopts the existing soil sampler arranged on the UAV, and the detachable connection between the UAV and the sampling device adopts the connection structure of the existing soil sampler and the UAV, so it is n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com