Method for realizing self-adaptive training in dynamic weight reduction device
An adaptive and dynamic technology, applied in the field of adaptive training, can solve problems such as shortening the rehabilitation course, not knowing the moving speed, and feeling uncomfortable, so as to improve the training effect and reduce the discomfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to more fully explain the implementation of the present invention, the implementation examples of the present invention are provided, and these implementation examples are only illustrations of the present invention, and do not limit the scope of the present invention.
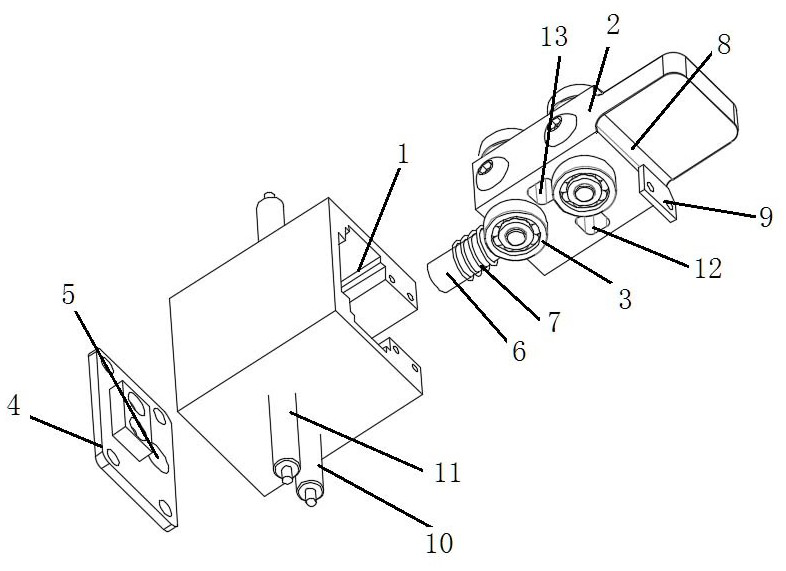
[0023] 1: U-shaped slide rail; 2: slider; 3: bearing; 4: end plate; 5: guide hole; 6: end rod; 7: return spring; 8: step part; 9: block; 10: laser pair Shooting switch A; 11: Laser shooting switch B; 12: Hole A; 13: Hole B; 14: Ring pressure sensor; 15: Pressure spring; 16: Linear displacement sensor;
[0024] The dynamic weight loss device in the present invention can be based on a dynamic weight loss device for rehabilitation training disclosed in Chinese Patent No. 2019217482033, and the offset detection sensor in it is replaced with the offset detection sensor in this application as a flexible rope that can detect intermittently A deflection sensor that moves the body forward or backward, o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com