High-maneuverability mooring type high-rise fire rescue robot in complex environment
A rescue robot, high mobility technology, applied in fire rescue and other directions, can solve problems such as inability to arrive in time, inconvenient movement, and potential safety hazards.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
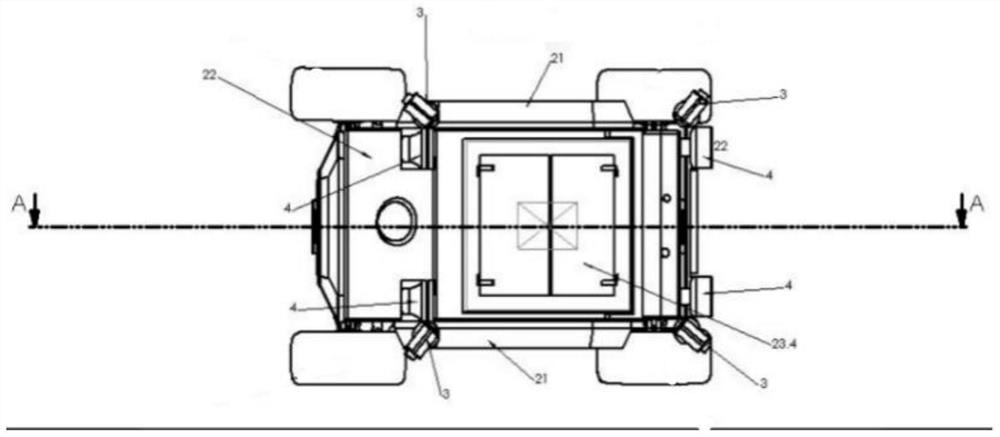
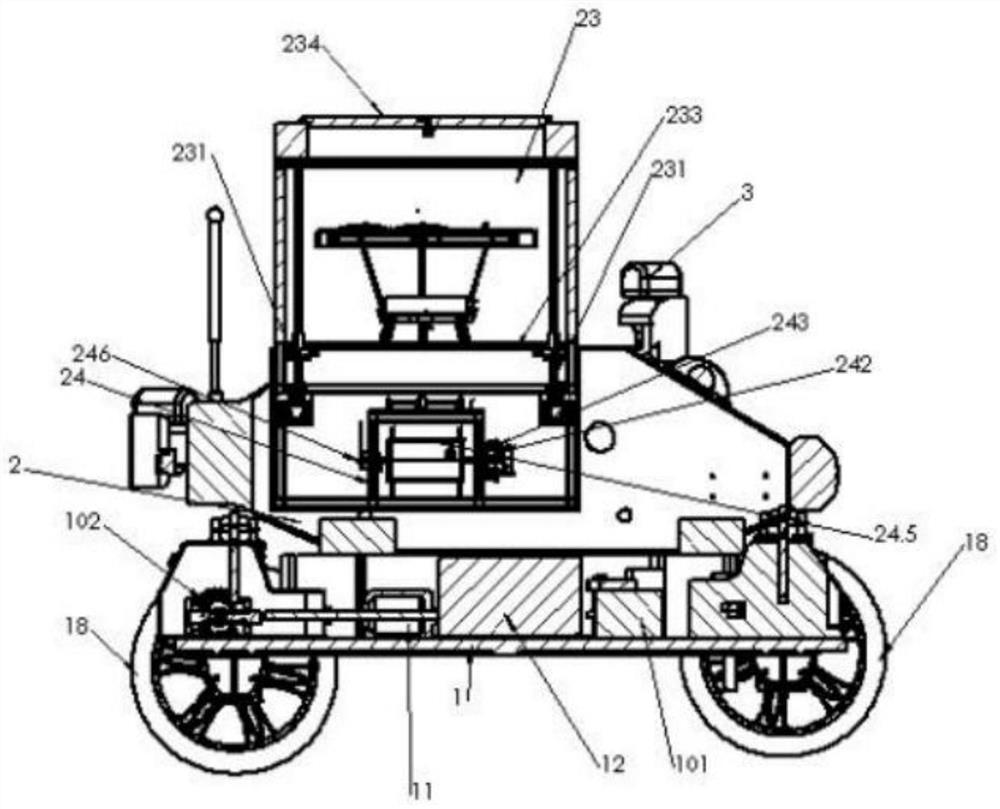
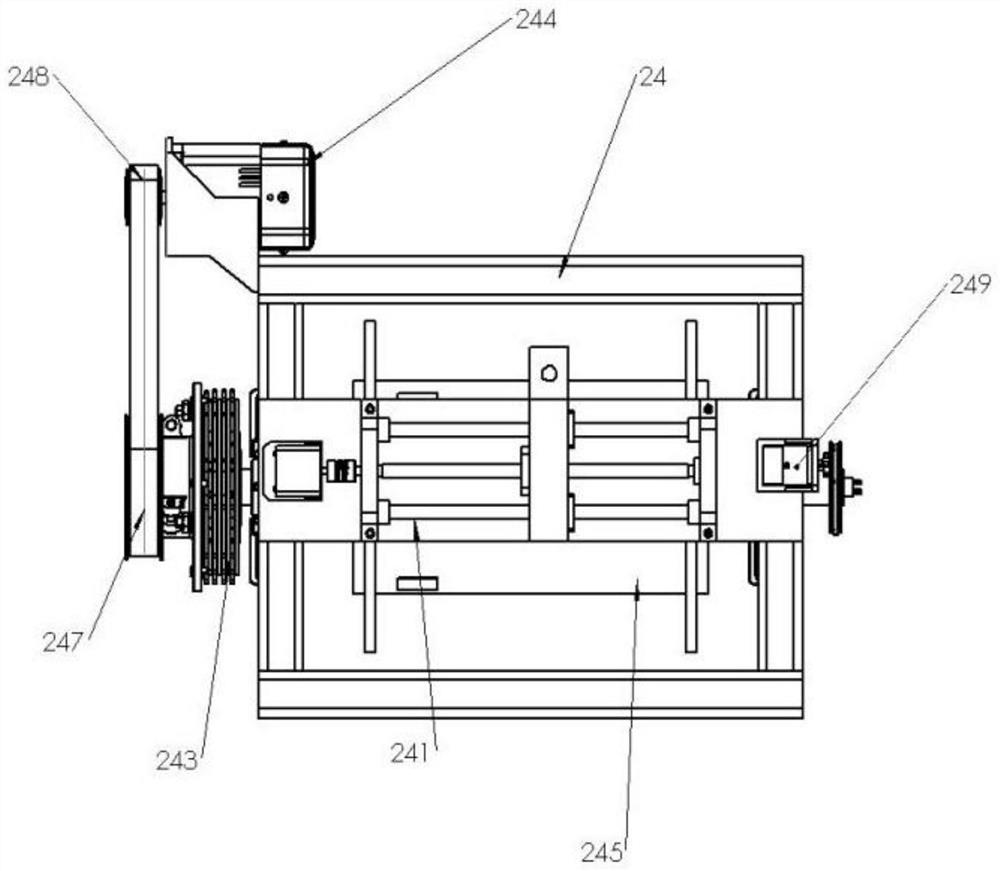
[0038] Such as Figure 1 to Figure 9As shown, a complex environment high-mobility tethered high-rise fire-fighting and rescue robot includes a car body, and the car body includes a chassis 1 and a cabin 2; the chassis 1 is provided with a brushless motor 11, a battery 12, and tires 18 , steering gear 101, differential gear 102, shock absorber, control system box 5, battery 12 is responsible for supplying power to the whole system (except unmanned aerial vehicle), and what the battery adopts is 24v. The chassis 1 is provided with a differential 102, the motor shaft of the brushless motor 11 extends into the front differential 102 and meshes with the gears of the differential 102, and the spherical connecting rod 13 on the side of the differential 102 Carry out transmission connection with tire connecting shaft 19, described chassis 1 comprises shock-absorbing device, described chassis 1 is provided with long connecting rod 14, and described shock-absorbing device is provided wi...
Embodiment 2
[0049] This example is a further improvement made on the basis of Implementation 1. Both the chassis 1 and the shell 22 are hollow structures made of aluminum alloy plates, and the hollow structures are filled with flame-retardant rigid polyurethane foam.
[0050] Working principle: the chassis 1 and the shell 22 made of aluminum alloy plate ensure the strength, and the flame-retardant rigid polyurethane foam improves the heat insulation and heat preservation, thereby protecting complex environments High mobility tethered high-rise fire rescue robot.
[0051] The components used in the present invention are general standard parts or components known to those skilled in the art, and their structures and principles are well known to those skilled in the art.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com