Three-dimensional map reconstruction method based on navigation point selection
A technology of three-dimensional maps and navigation points, which is applied in the re-radiation of electromagnetic waves, the use of re-radiation, measurement devices, etc., can solve the problems of inability to carry out detailed reconstruction in the area, time-consuming, low efficiency, etc., and achieve strong environmental adaptability, The effect of improving accuracy and speeding up
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
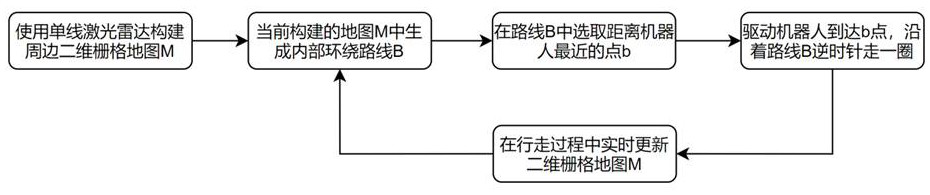
[0017] like figure 1 It is a flowchart of a three-dimensional map reconstruction method based on navigation point selection in the present invention, and the three-dimensional map reconstruction method includes the following steps:
[0018] Step 1: In an indoor environment, place a robot. The chassis of the robot has its own odometer, and the robot can move freely on the ground. At the same time, the odometer of the chassis can output the data information of the wheel speedometer and IMU. A single-line laser radar is installed at a position where the chassis height of the robot is 10-20cm, which can detect obstacles and is conducive to planning the movement trajectory of the robot. At the same time, it is necessary to ensure that the single-line laser radar is blocked by less than 90°; The chassis height of the robot is 40-60cm, and an RGBD camera is installed. This height is the height where most objects in the room are located. Selecting such a height can better reconstruct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com