Robot autonomous anomaly repair skill learning method and system
A learning method and robot technology, applied in the field of robot skill learning, can solve the problem of lack of consideration of the characteristics of human-machine cooperation system, and achieve the effect of promoting autonomous operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
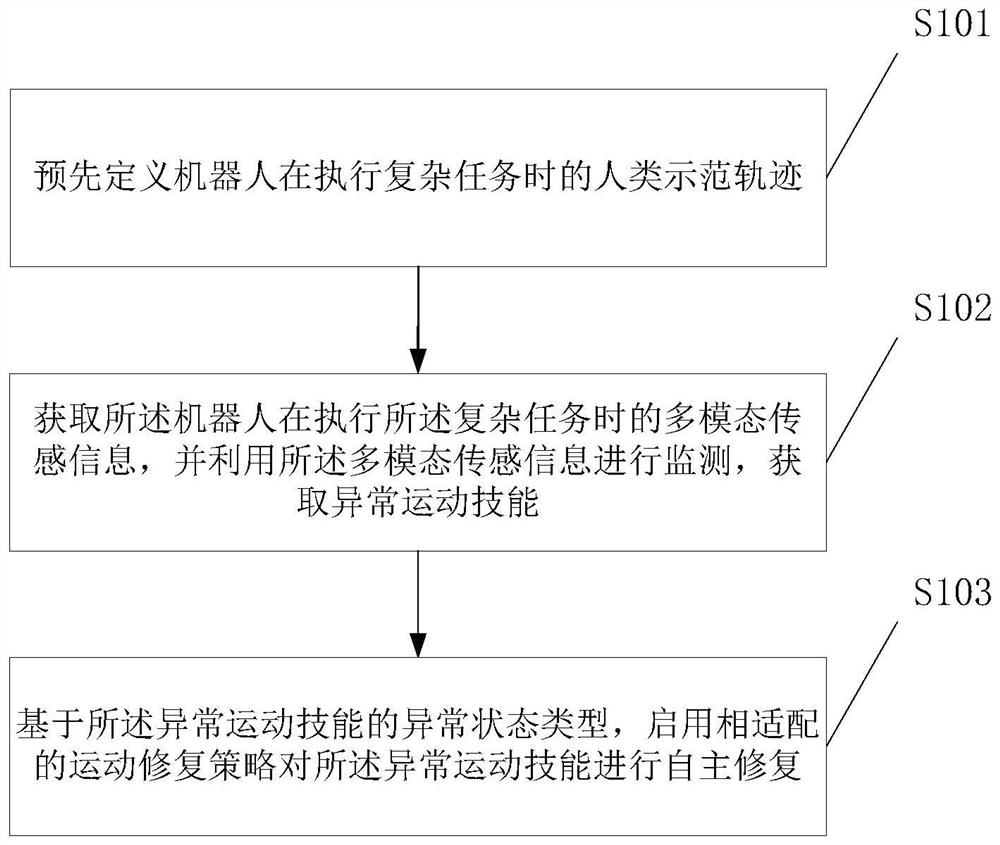
[0045] see figure 1 , figure 1 A schematic flowchart of a method for learning a robot autonomous abnormal repair skill in an embodiment of the present invention is shown.
[0046] Such as figure 1 As shown, a robot autonomous abnormal repair skill learning method, the method includes:
[0047] S101. Predefine human demonstration trajectories when the robot performs complex tasks;
[0048] The implementation process of the present invention includes: (1) predefining the N motor skills required by the robot when performing complex tasks; (2) using a finite state machine (FSM) to serialize the types and execution orders of the N motor skills, Generate corresponding N motor skill sequences.
[0049] S102. Obtain multi-modal sensing information of the robot when performing the complex task, and use the multi-modal sensing information to monitor and obtain abnormal motor skills;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com