Single mobile robot indoor positioning method based on laser radar
A mobile robot and lidar technology, which is applied in the re-radiation and utilization of re-radiation of instruments, electromagnetic waves, etc., can solve problems such as the influence of GPS positioning accuracy and cannot solve indoor positioning problems well, and achieves simple implementation and indoor positioning. The effect of low precision and good applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0034]In order to describe the present invention more specifically, the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
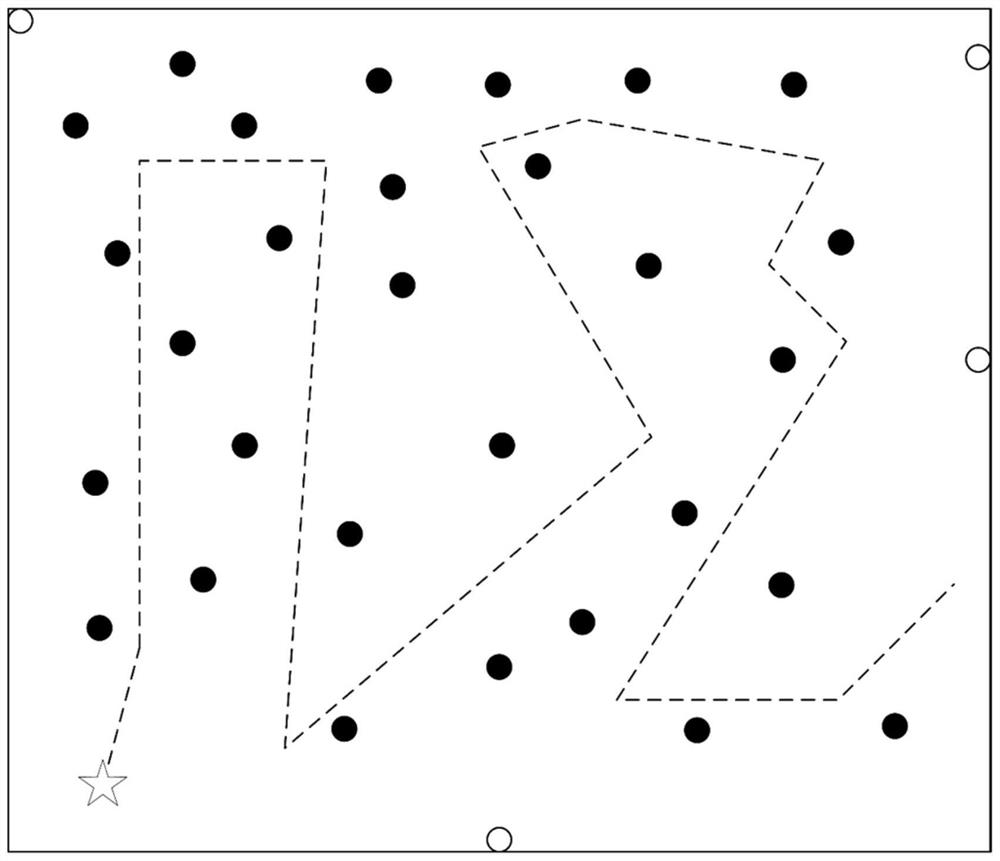
[0035] Such as figure 1 As shown, the indoor positioning method of a single mobile robot based on laser radar proposed by the present invention comprises the following steps:
[0036] Step 1: The upper controller plans an indoor moving path for a mobile robot equipped with lidar, and controls it to move to the starting point of the path. The mobile robot starts to move from the starting point of the path, moves along the specified path, and stops at the end of the path. The movement start time is t 0 , the termination time is t n and the current moment is t, t∈[t 0 ,t n ];
[0037] Specifically, the upper controller plans the indoor moving path process for the mobile robot as follows:
[0038] at t≠t 0 time, the number of the same reflectors detecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com