A new energy vehicle anti-slope auxiliary control method
A new energy vehicle, auxiliary control technology, applied in the direction of control drive, electric vehicle, electric energy management, etc., can solve the problem of being unable to stand on the slope for a long time, and achieve the effect of saving energy, improving comfort and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
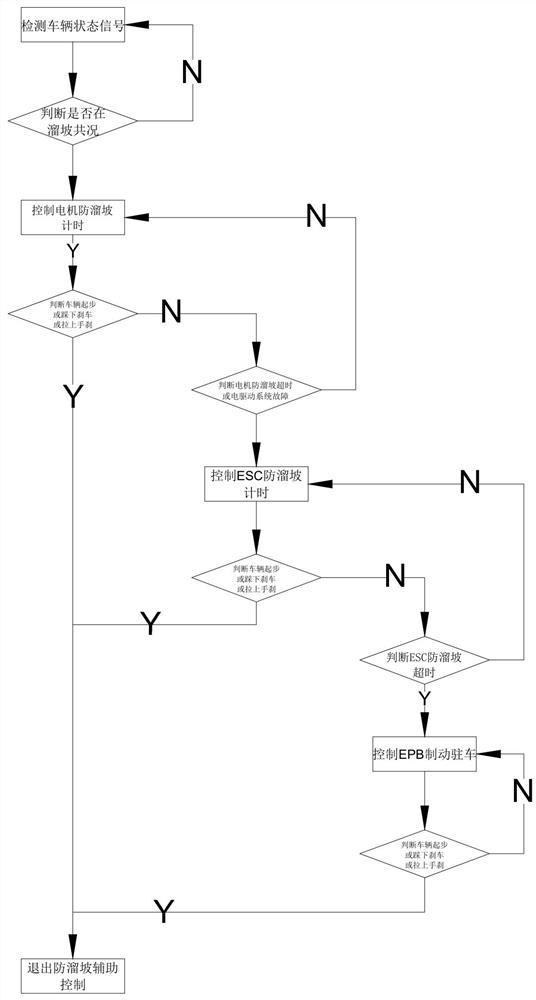
[0047] see figure 2 , the new energy vehicle anti-slope auxiliary control method of the present invention, its process is:
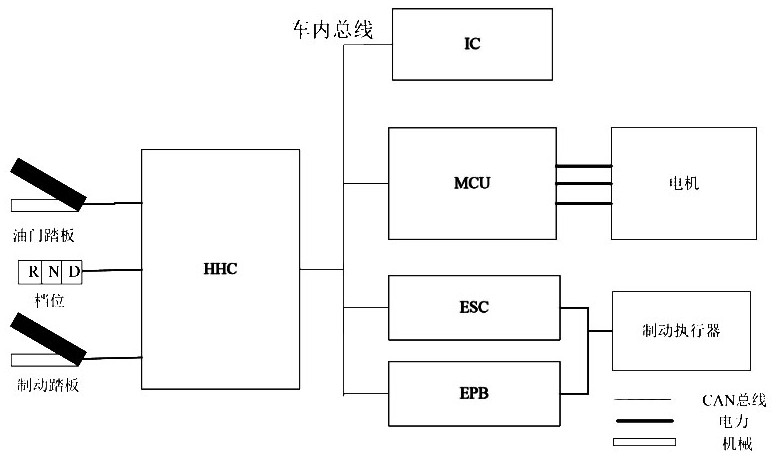
[0048] When the anti-slope system recognizes the start-up slope condition, it aims to control the motor speed to 0, and controls the motor to output the locked-rotor torque to prevent the slope;
[0049] When the anti-slope system recognizes that the motor anti-slope overtime or the electric drive system fails to maintain the anti-slope stall torque, and the vehicle does not start or the brake is applied or the handbrake is applied, the vehicle body stability controller controls the brake execution The device outputs the driving braking force to prevent the slope from slipping;
[0050] When the anti-slope system recognizes that the anti-slope of the body stability controller has timed out and the vehicle has not stepped on the brake or pulled the handbrake, it controls the electronic parking controller to control the parking slope, and the electronic pa...
Embodiment 2
[0068] Compared with Embodiment 1, the new energy vehicle anti-slope auxiliary control method of this embodiment further defines the specific implementation steps as follows:
[0069] s1, Detect vehicle status: collect gear position, accelerator pedal opening, brake pedal switch and motor speed signals;
[0070] s2, judging whether the vehicle is in the start-up slope condition:
[0071] When the vehicle gear is in the forward gear and the brake is not applied, and the motor speed is less than a preset negative speed limit n1 (for example -10rpm); if yes, go to step S3; if not, go back to step S1;
[0072] S3, control the motor anti-slope and timing: according to the motor speed, PI controls the output motor target torque T_FLP; and starts timing the motor anti-slope time t_Mot;
[0073] S4, judging whether the vehicle is started or the brake is stepped on or the handbrake is applied: whether the accelerator pedal is depressed and the driving force is greater than the sum of ...
Embodiment 3
[0082] The new energy vehicle anti-slope auxiliary control method of this embodiment is different from Embodiment 2 in that: in step S3, the control flow of timing after entering the motor anti-slope is as follows:
[0083] When it is judged that the vehicle starts to slide downhill (when the vehicle gear is in the forward gear, and the brake is not applied, and the motor speed is less than a preset negative speed limit n1), start timing; When the slope flag is invalid, stop timing;
[0084] The calculation method of the motor anti-slope activation flag is as follows:
[0085] The sign bit S is the sign bit of the vehicle's starting downhill condition, and the judgment conditions are: the vehicle gear is in the forward gear, and the brake is not stepped on, and the motor speed is less than a preset negative speed limit n1;
[0086] The flag bit R is the motor anti-slope automatic exit flag, and the judgment condition is the electric drive system failure or the motor anti-slop...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com