Self-moving and landing guidance method and system for rotor UAV
An autonomous mobile, unmanned rotor technology, applied in the control/adjustment system, non-electric variable control, three-dimensional position/channel control, etc., can solve problems such as time rush, drone rollover damage, roughness, etc., to improve landing speed and the effect of reducing the risk of rollover
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
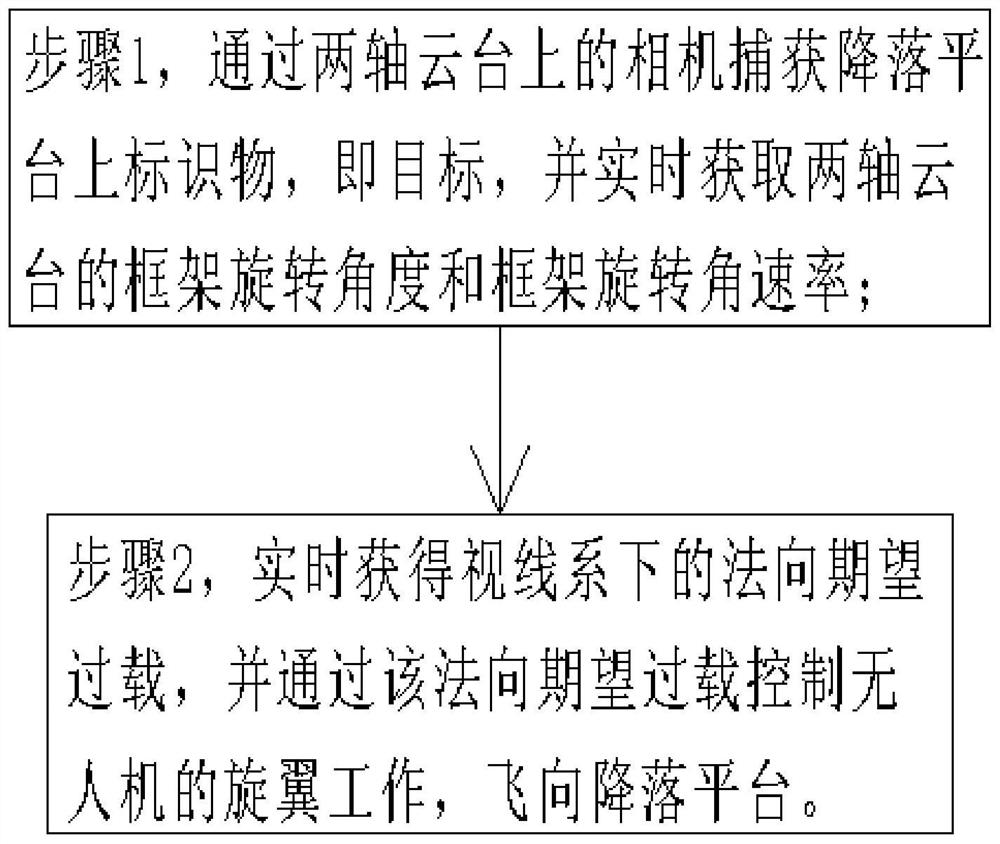
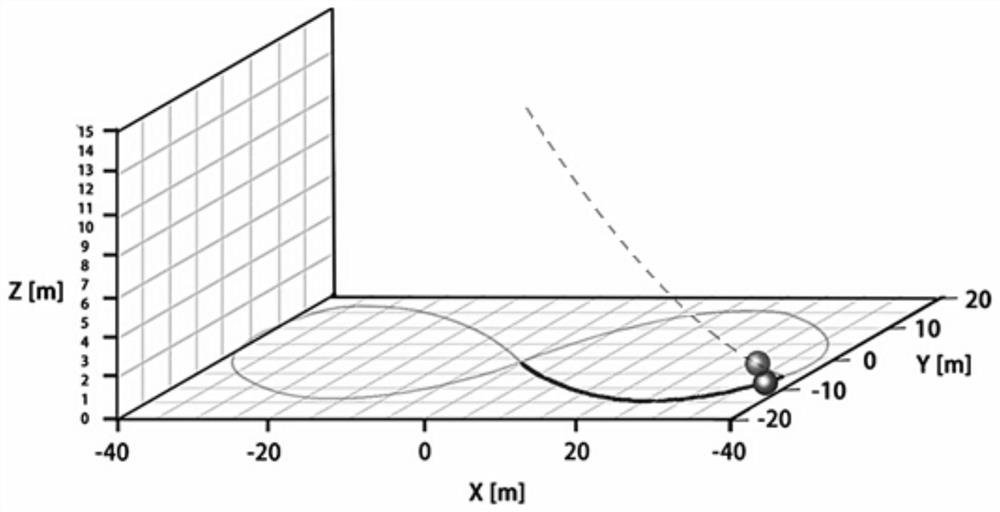
[0082] Taking the car cruising around the figure-eight route on the ground as the target, there is a marker on the top of the car that can be captured by the camera on the UAV; the target's trajectory is as follows: figure 2 shown by the solid line in
[0083] The initial position coordinates of the UAV are (0,0,15), when the UAV is at the initial position, the coordinates of the target location are (20,-14,0), and the initial speed of the UAV is 0m / s, the two-axis gimbal on the UAV can track the marker in real time, so that the marker is always in the center of the field of view, and output the frame rotation angle and frame rotation angular rate of the two-axis gimbal;
[0084] The UAV is guided and controlled by the autonomous movement and landing guidance method of the rotor UAV, and the normal expected overload is calculated in real time, and the UAV is controlled to fly to the target through the normal expected overload.
[0085] Specifically, the expected overload in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com