5G-based mining area unmanned transportation system marshalling cooperative operation method
A technology of transportation system and mining area, which is applied in the field of marshalling and collaborative operation of 5G unmanned transportation system in mining area. It can solve the problems of inability to obtain data for car meeting processing, temporary short-distance road sections are narrow, and unsuitable, so as to optimize mining truck transportation, The effect of improving efficiency and improving transportation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
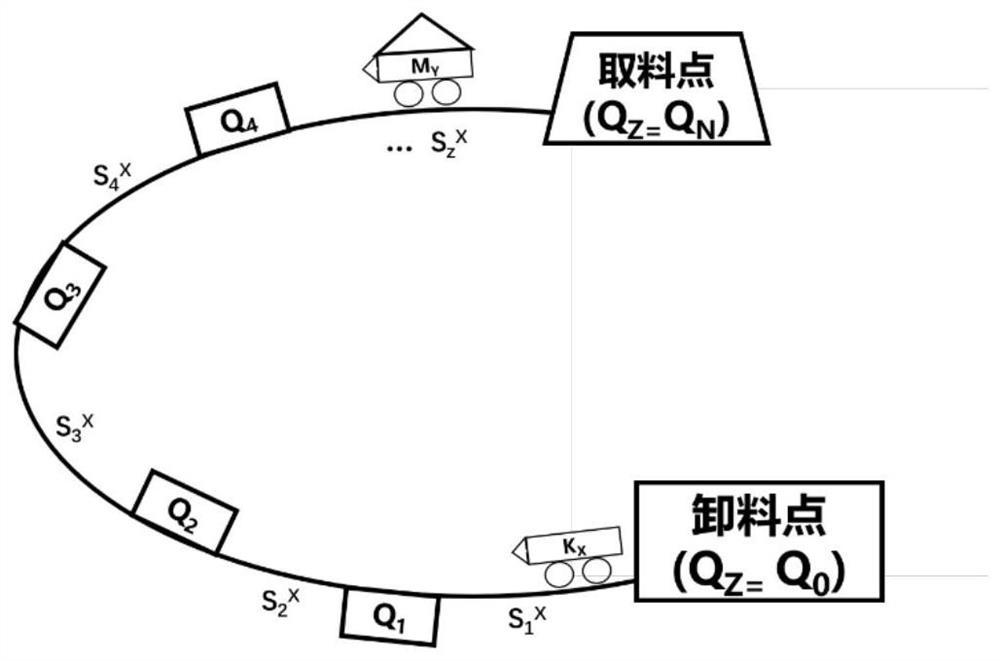
[0038] S1: RSUs are set on the mining area transportation road with the known meeting position as the node, and the forward direction of the empty mining truck (that is, the unloading point to the picking point) is recorded as Q in sequence 0 ,Q 1 ,Q 2 ,...,Q Z , 0≤Z≤N, N is the number of meeting positions plus one; the unloading point is Q 0 , the retrieving point is Q N ;The empty mine card K numbered X X space slice, with S Z X Indicates that X represents the unloaded mining card K on the space chip X , Z represents the number of the tail RSU in the space, that is, the number of the position of the tail meeting car; the fully loaded mining truck M with the number Y Y starting point is Q N , that is, the pick-up point; if figure 1 shown.
[0039] Empty mining truck K X At the pick-up point, obtain information such as the position of the vehicle, the planned driving speed, and the range of acceleration and deceleration through the 5G-based multi-vehicle cooperative...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com