Robot positioning control method and system based on point cloud normal vector direction clustering servo
A technology of robot positioning and normal vector direction, applied in the field of robot positioning control, can solve problems such as low precision and poor positioning stability, and achieve the effect of improving time efficiency, good adaptability, and high-precision positioning results
Active Publication Date: 2022-05-31
HUAZHONG UNIV OF SCI & TECH
View PDF7 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0005] Aiming at the defects and improvement needs of the prior art, the present invention provides a robot positioning control method and system based on point cloud normal vector clustering servo, the purpose of which is to solve the problem when the existing visual servo technology is applied to weak texture , there are technical problems of poor positioning stability and low precision
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
[0068] The actual point cloud image is the real-time shooting of the depth camera, and is the real imaging result;
[0073]
[0076] During the movement of the robot, the RGBD depth camera will move accordingly.
Embodiment 2
[0089] In this embodiment, for the specific implementation of each module, reference may be made to the descriptions in the above method embodiments, which will not be described here.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
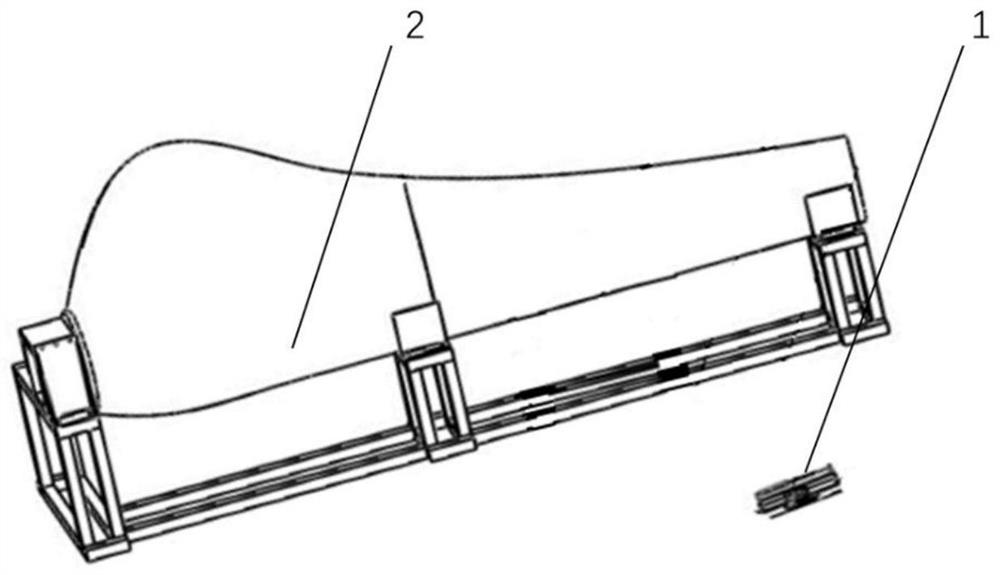
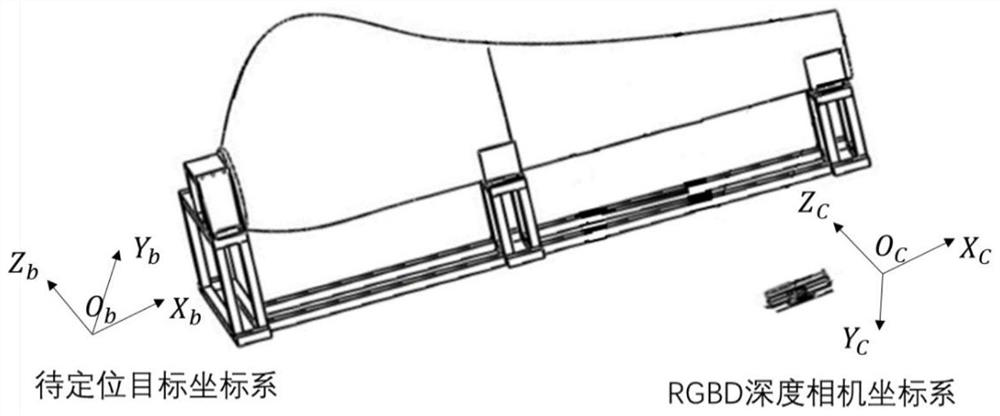
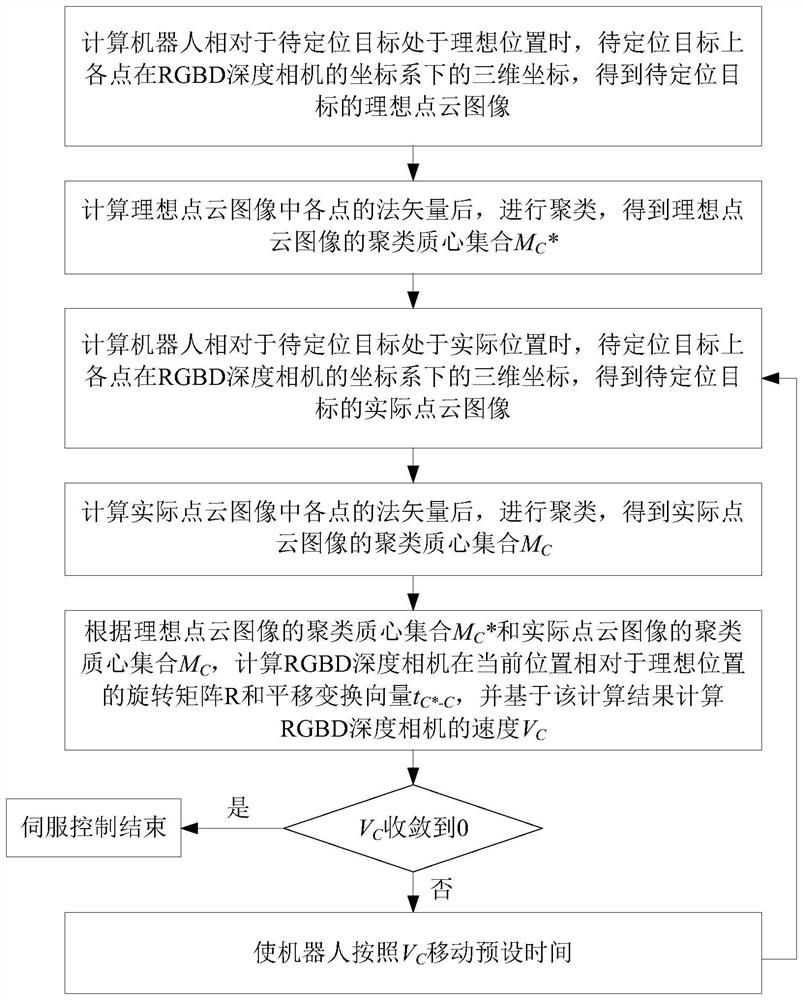
The invention discloses a robot positioning control method and system based on point cloud normal vector clustering servo, which belongs to the field of visual servo technology. The robot has six degrees of freedom of motion and is fixedly connected to an RGBD depth camera; the method includes: obtaining The ideal point cloud image of the target to be positioned; calculate the normal vector of each point in the ideal point cloud image and cluster to obtain the cluster centroid set to obtain the actual point cloud image of the target to be positioned; calculate the normal vector of each point in the actual point cloud image and clustering to get the cluster centroid set M C ;According to the cluster centroid set and M C Calculate the rotation matrix and translation transformation vector of the RGBD depth camera at the current position relative to the ideal position, and calculate the speed V of the RGBD depth camera based on the calculation result C ; If V C did not converge to 0, making the robot follow V C After moving the preset time, V is recalculated C and judged until V C converges to 0. The present invention has stable and high-precision positioning results for weak texture targets, and has better adaptability.
Description
Robot positioning control method and system based on point cloud normal vector direction clustering servo technical field The invention belongs to the visual servo technical field, more specifically, relate to a kind of cluster servo based on point cloud normal vector direction The robot positioning control method and system. Background technique Robot positioning and servo control are widely used in robotic processing and manufacturing, intelligent logistics warehousing, medical assistance and other fields. Wide range of application requirements. Visual servoing is a method of using visual information to control the robot to move to the desired position to realize the robot Positioning visual control technology. Existing visual servoing techniques are generally divided into position-based visual servoing (PBVS) and image-based visual servoing. Service (IBVS). PBVS needs to obtain the geometric model of the target, the internal parameters of the camera and the ob...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & Authority Patents(China)
IPC IPC(8): G06T7/70G06T7/30G06T7/20G06V10/762G06K9/62
CPCG06T7/70G06T7/30G06T7/20G06F18/23
Inventor 陶波张士羿龚泽宇
Owner HUAZHONG UNIV OF SCI & TECH
Features
- R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
Why Patsnap Eureka
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Social media
Patsnap Eureka Blog
Learn More Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com