A Circular Trajectory Planning Method for Robots Based on Sinusoidal Curves
A sinusoidal curve and trajectory planning technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as not considering the change of robot joint angles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
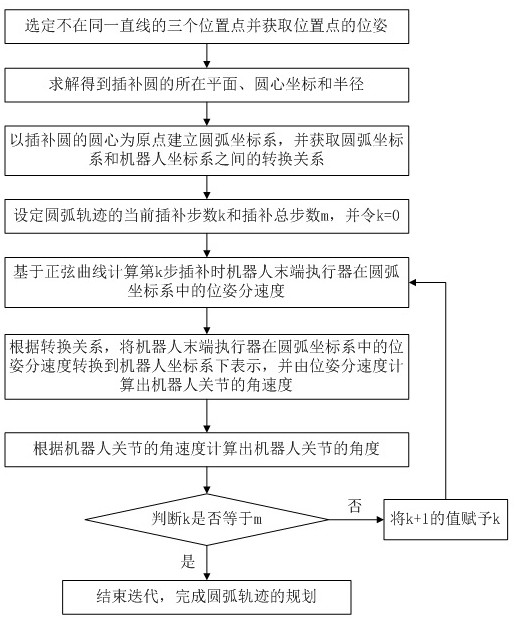
[0089] Such as figure 1 As shown, a sine curve-based robot arc trajectory planning method includes the following steps:
[0090] S1: Select three position points that are not on the same straight line and obtain the pose of the position points in the robot coordinate system;
[0091] S2: Obtain the plane, center coordinates and radius of the interpolation circle passing through the three position points by solving according to the pose of the position point;
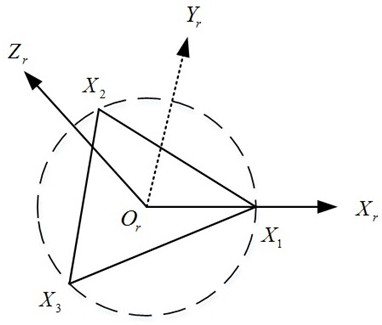
[0092] S3: Establish the arc coordinate system with the center of the interpolation circle as the origin, and obtain the conversion relationship between the arc coordinate system and the robot coordinate system ;
[0093] S4: Set the current interpolation steps k and the total interpolation steps m of the arc trajectory, and set k=0; among them, k=0, 1, ..., m;
[0094] S5: Calculating the pose and velocity of the robot end effector in the arc coordinate system during the k-th step interpolation based on the sinusoid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com