Wearable fracture reduction and rehabilitation integrated robot
A wearable and robotic technology, applied in the field of medical devices, can solve problems such as difficulty in judging the degree of bone healing, inconvenience in daily life, and increased patient burden, achieve accurate and safe fracture rehabilitation, facilitate daily actions, and expand the scope of application.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific embodiments of the present invention will be further described in detail below.
[0029] In order to further understand the invention content, characteristics and effects of the present invention, the following examples are given, and detailed descriptions are as follows in conjunction with the accompanying drawings:
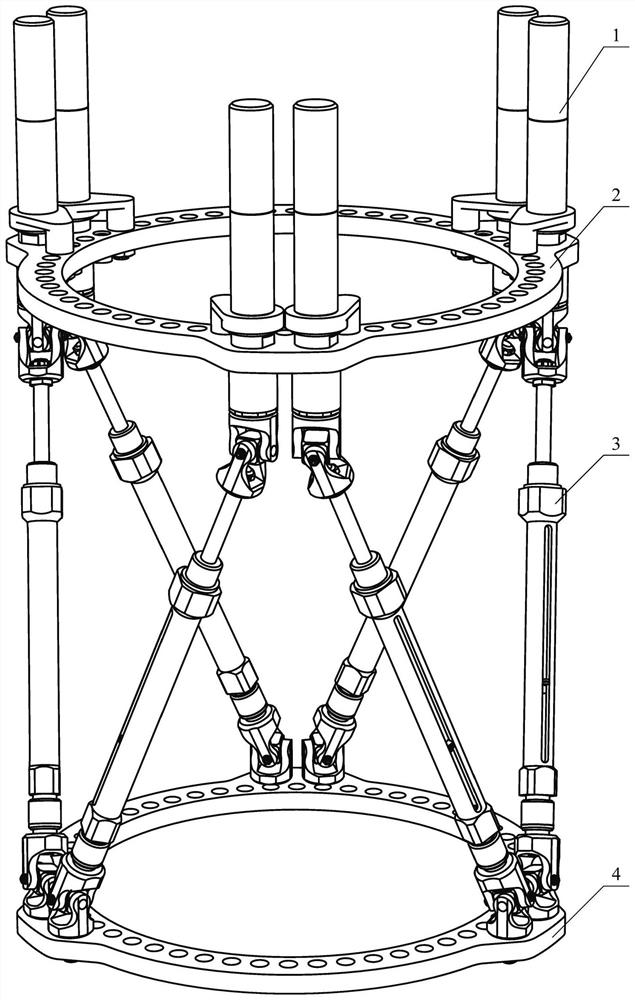
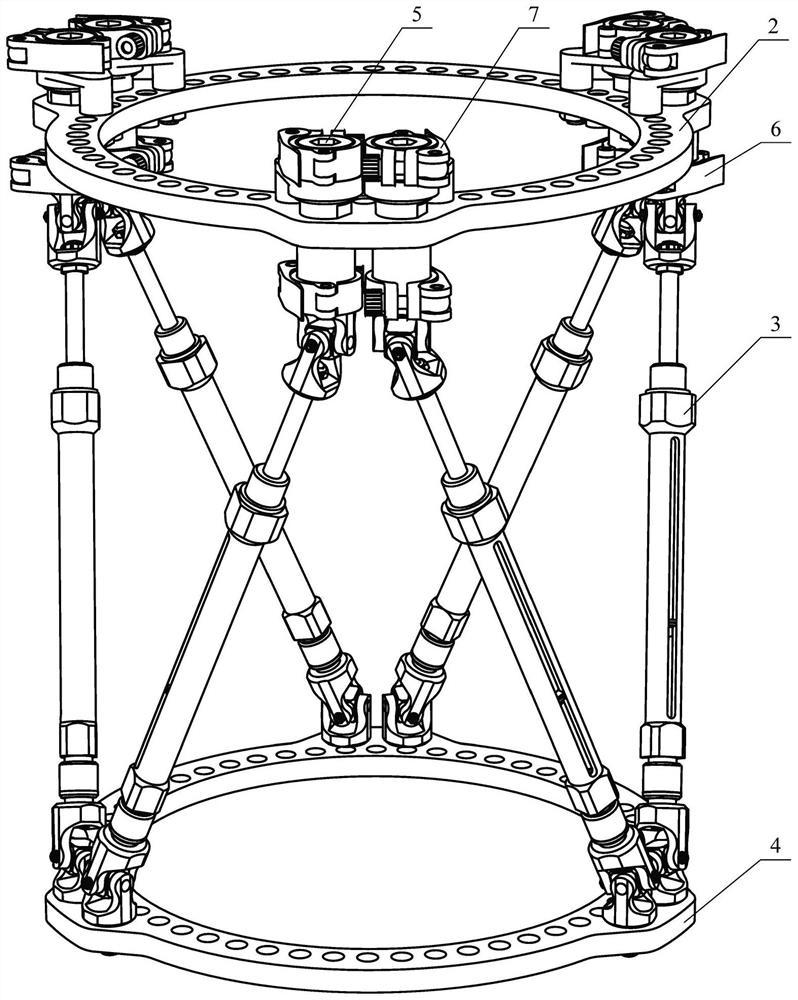
[0030] as attached Figures 1 to 2 As shown, the wearable fracture reduction and rehabilitation integrated robot of the present invention includes a proximal ring 2 and a distal ring 4 arranged below the proximal ring, and the proximal ring 2 and the distal ring 4 pass through six active Branch 3 connections.
[0031] The proximal ring 2 and the distal ring 4 both include rings and are center-symmetric structures, and the outer edges of the proximal ring 2 and the distal ring 4 protrude outward at intervals of 120° to form Flanges, at each flange place are provided with two outer ring mounting holes for connecting the active branch chain 3 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com