Planetary exploration vehicle wheel active following control method, system and planetary exploration vehicle
A planetary exploration vehicle and control system technology, applied in the field of control systems, planetary exploration vehicles, and planetary exploration vehicle wheel active follow control methods, can solve the problem of high energy consumption of the driving wheels of wheeled mobile robots, reduce internal force confrontation, The effect of high mobility efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the above objects, features and advantages of the present invention more comprehensible, specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0035] If there are descriptions involving "first", "second", etc. in the embodiments of the present invention, the descriptions of "first", "second", etc. Significance or implicitly indicates the number of technical features indicated.
[0036] An embodiment of the present invention provides a method for actively following the wheels of a planetary exploration vehicle, the method comprising:
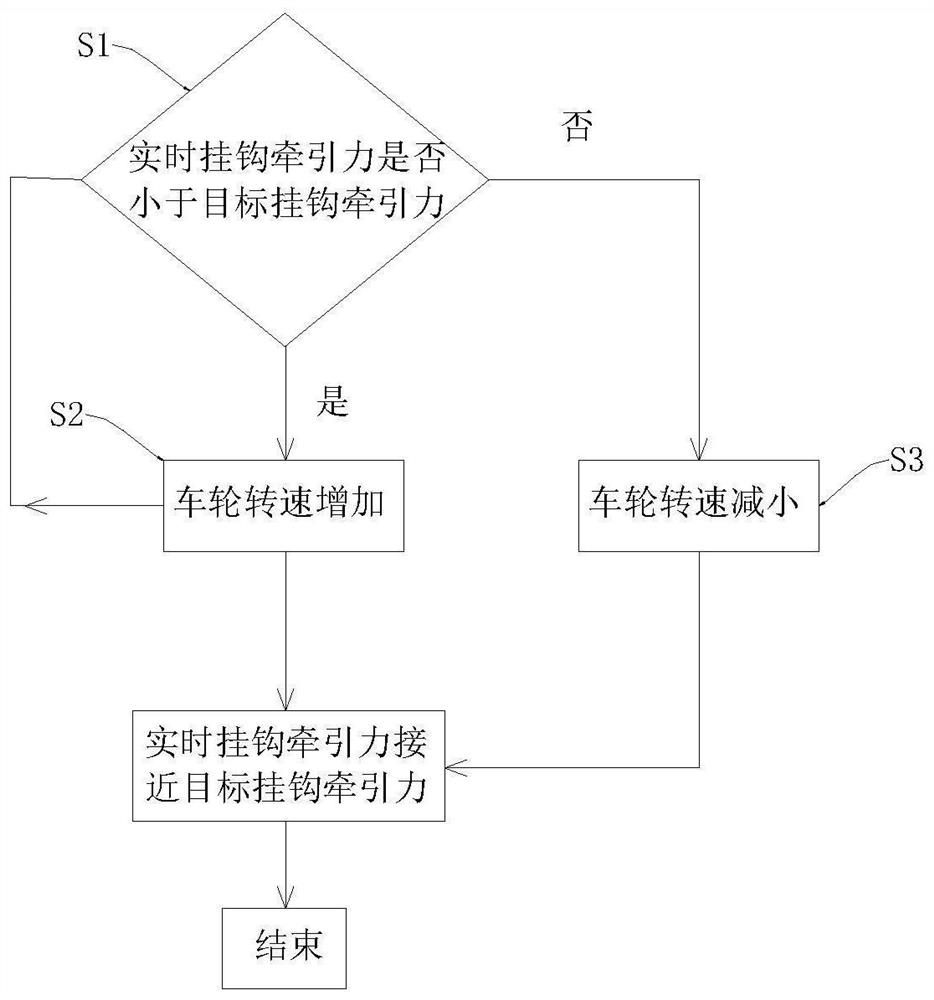
[0037] Adjust the speed of the support wheel to make the real-time hook traction F of the support wheel x Approaching target hitch traction F xd, so as to reduce the driving force and resistance of the support wheels to the planetary exploration vehicle, so that the support wheels are used to provide support for the vehicle body of the planetary e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com