A jumping robot with controllable energy storage and take-off angle
A robot and energy storage technology, applied in the field of jumping robots, can solve the problems of restricting the movement flexibility of jumping robots and the diversity of activity space, hindering practical applications, etc., and achieve the effects of compact structure, light weight and simple control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described in detail below in conjunction with the accompanying drawings.
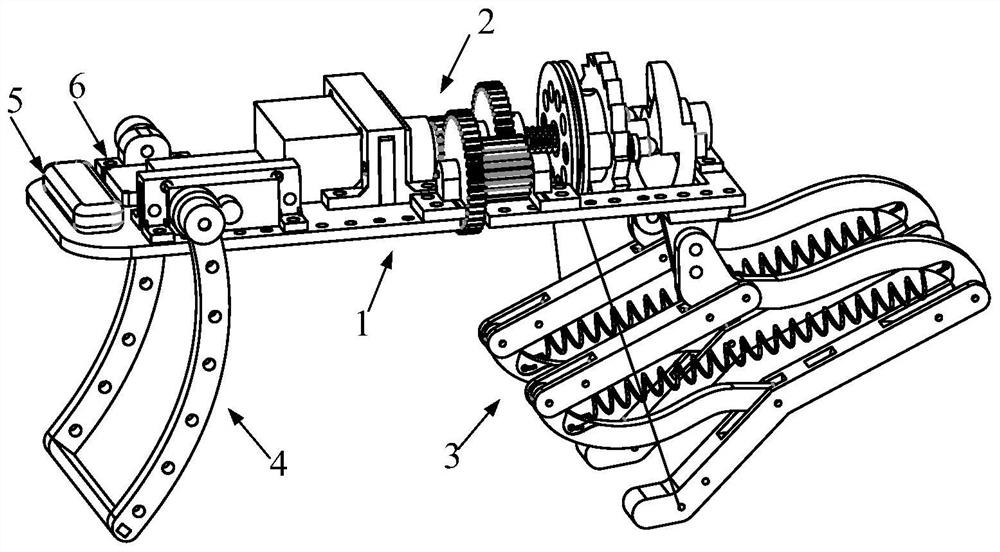
[0040] The invention provides a jumping robot with controllable energy storage size and take-off angle, such as figure 1 As shown, it includes a frame 1 , a controllable winding / unwinding unit 2 , a jumping leg unit 3 , a posture-adjusting leg unit 4 , a battery 5 and a controller 6 .
[0041] The frame 1 is a rectangular thin plate made of carbon fiber, with installation holes designed on it for fixing the controllable winding / releasing unit 2, the jumping leg unit 3, the posture adjusting leg unit 4, the forelimb support 406 and the battery 5 and controller 6.
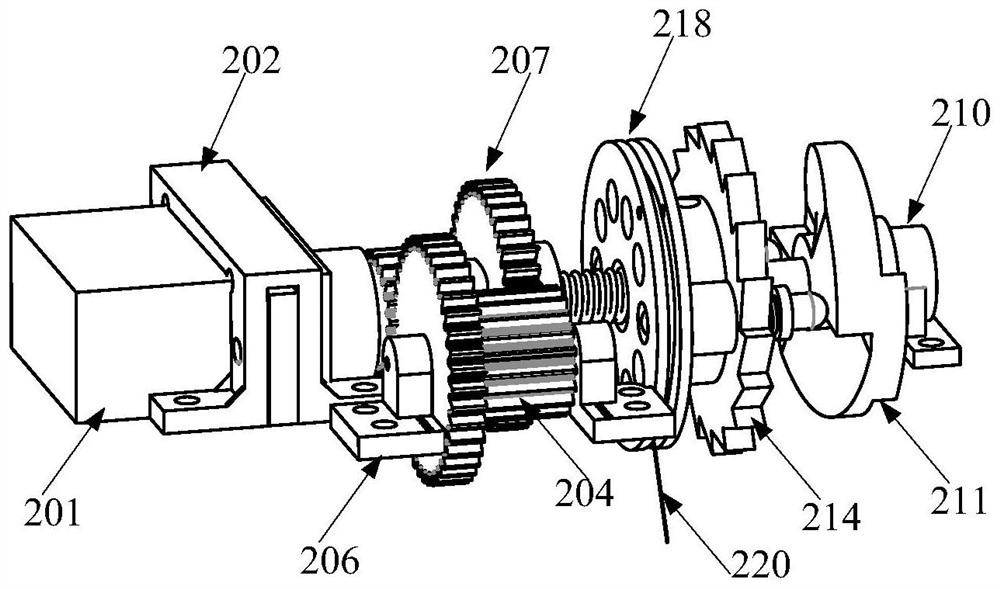
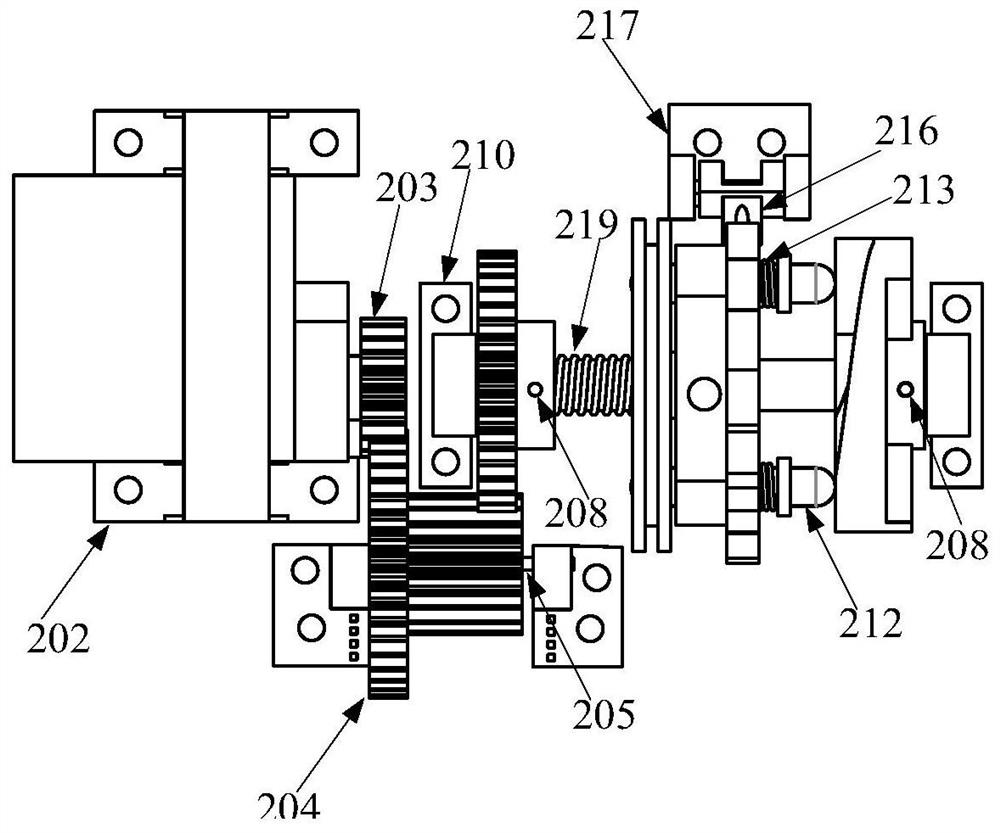
[0042] The controllable winding / releasing unit 2 includes a main driver 201, a main driver support 202, a pinion 203, a double gear 204, a gear shaft 205, a double gear support 206, a large gear 207, a pin 208, a transmission Axle 209, transmission shaft support 210, cylindrical cam 211, trigger p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com