Bypassing collision prevention optimization method of self-crawling type robot based storing system
A technology of storage systems and optimization methods, applied in storage devices, transportation and packaging, etc., can solve problems such as being unsuitable for complex models
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
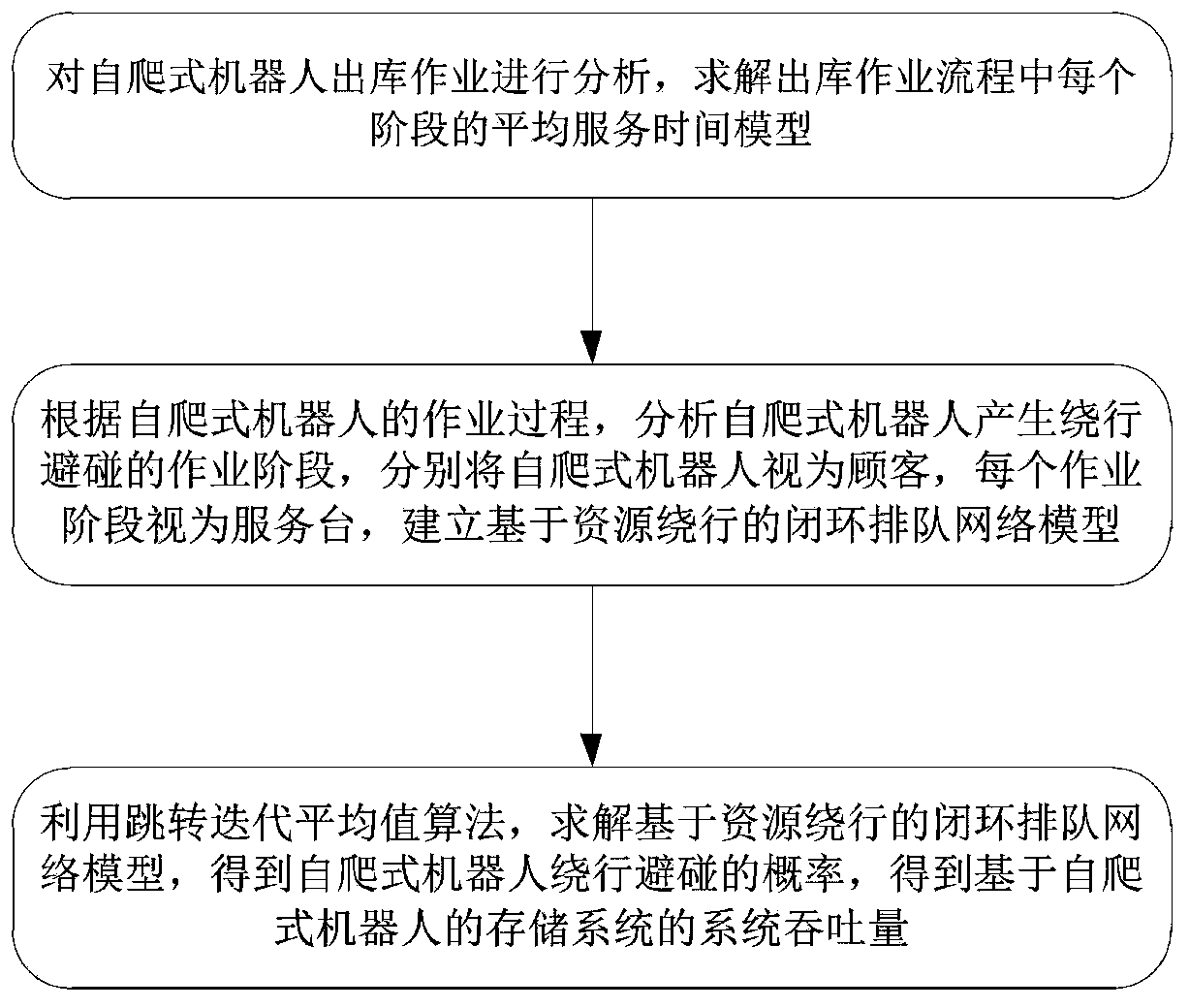
[0060] Such as figure 2 Shown, a kind of detour collision avoidance optimization method based on the storage system of self-climbing robot, this method comprises the following steps:
[0061] S1: Analyze the outbound operation of the self-climbing robot, and solve the average service time model of each stage in the outbound operation process.
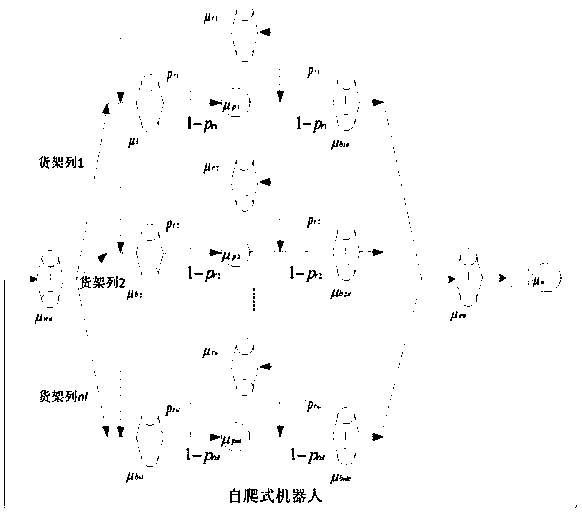
[0062] S2: According to the operation process of the self-climbing robot, analyze the operation stages of the self-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com