Test system and method based on automatic driving vehicle in-the-loop pedestrian-vehicle conflict scene
An automatic driving and scene technology, applied in the field of vehicle traffic, can solve problems such as the inability to meet the needs of automatic driving tests, and achieve the effect of meeting the test needs and the real test scene.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
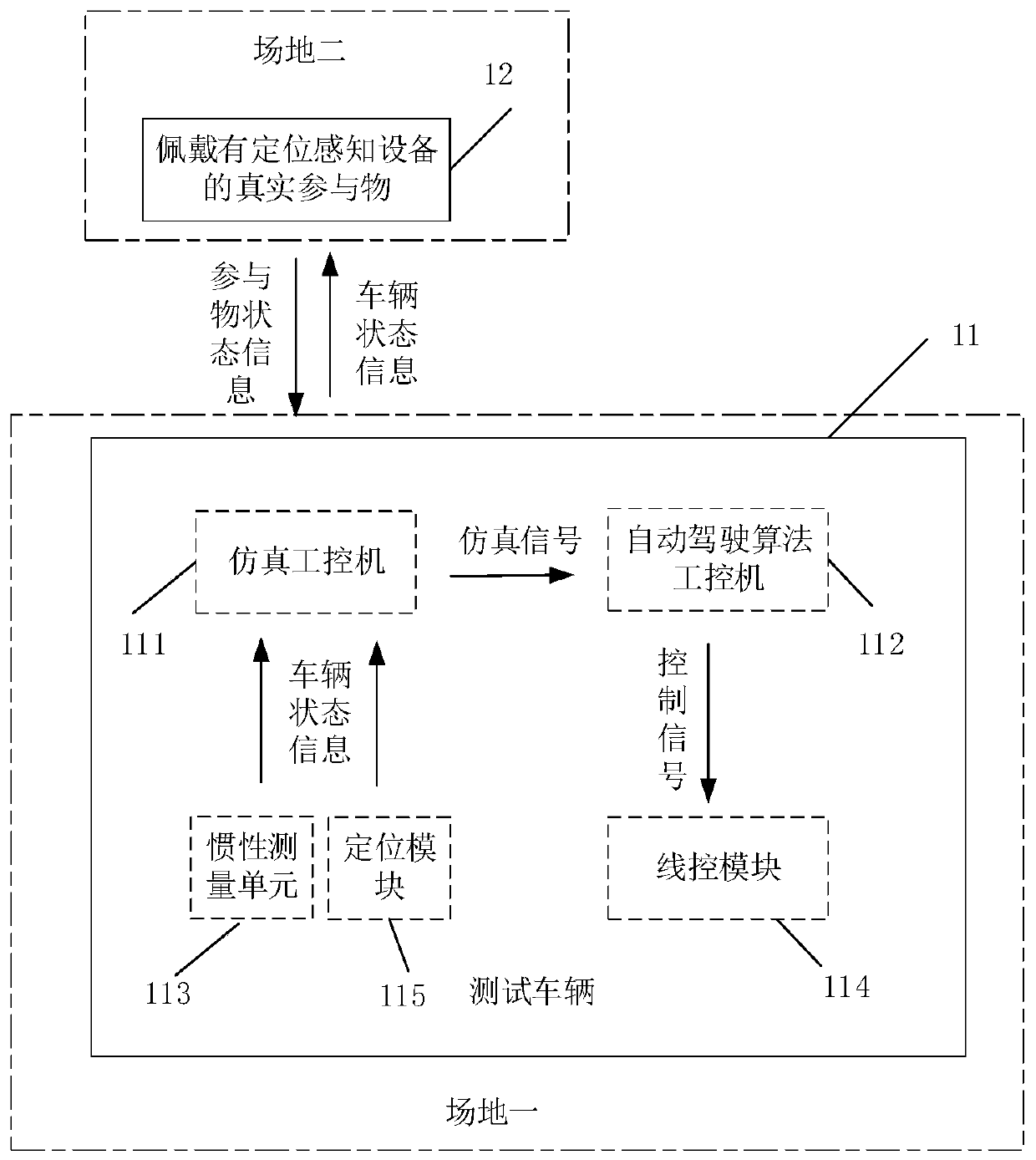
[0014] figure 1 A schematic diagram of the structure of a test system based on a vehicle-in-the-loop conflict scene for autonomous driving provided in Embodiment 1 of the present invention, including: a test vehicle 11, a simulation industrial computer 111 located inside the test vehicle, and an automatic driving algorithm industrial computer 112, wearable There is a real participant of the location-aware device 12 .
[0015] Among them, the simulated industrial computer 111 is used to obtain the vehicle state information of the test vehicle, and send the vehicle state information to the positioning sensing device 12; the positioning sensing device 12 is used to display the vehicle state information for the real participants to carry out Watch, and obtain the participant status information of the real participant, and send the participant status information to the simulated industrial computer 111; the simulated industrial computer 111 is also used to update the virtual test s...
Embodiment 2
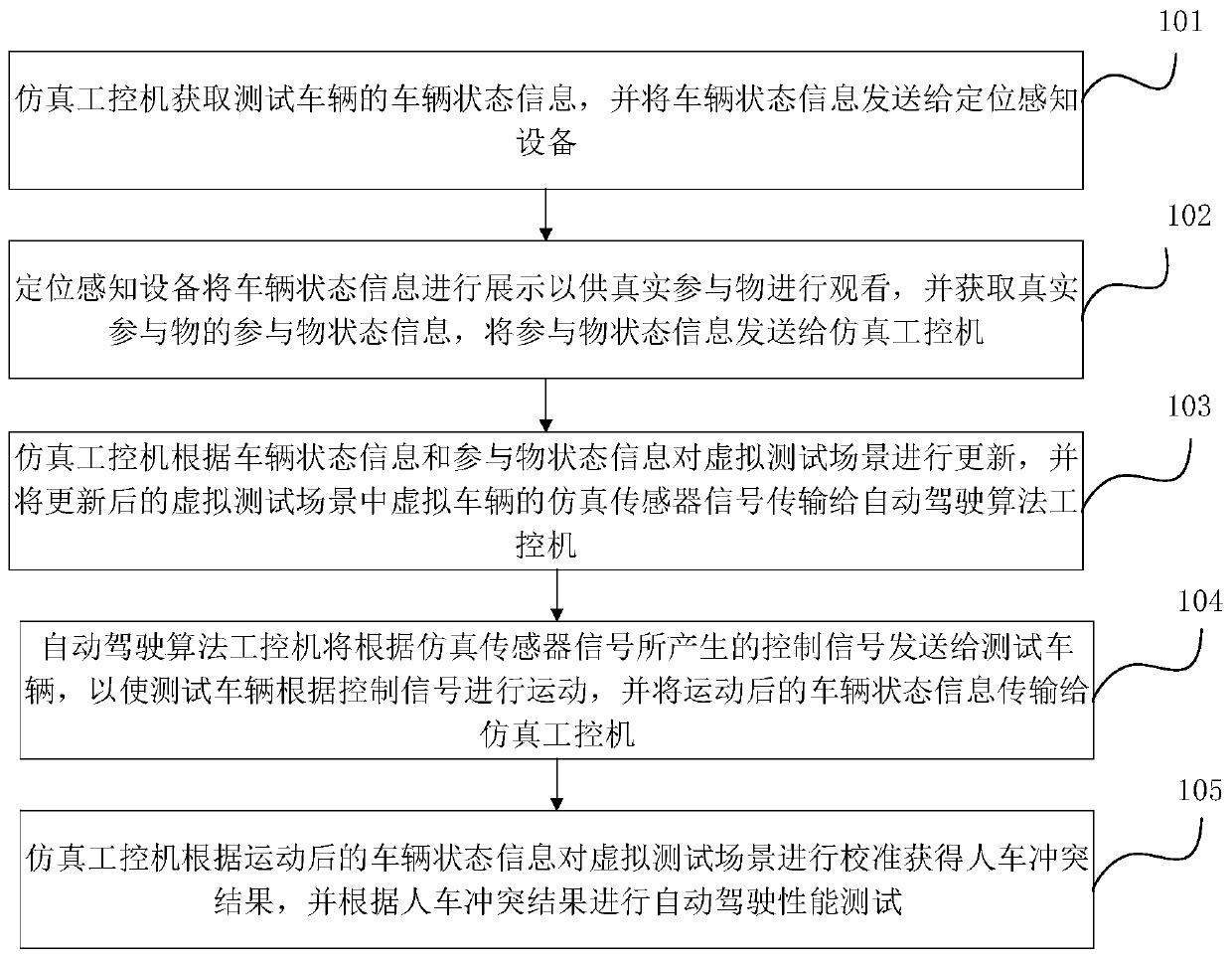
[0033] figure 2 It is a flow chart of the test method based on the vehicle-in-the-loop human-vehicle conflict scenario of the automatic driving vehicle provided by the second embodiment of the present invention. This embodiment is applied to the test system based on the human-vehicle conflict scene of the automatic driving vehicle in the above embodiment. , the method of this embodiment specifically includes the following operations:
[0034] Step 101, the simulated industrial computer obtains vehicle state information of the test vehicle, and sends the vehicle state information to the location sensing device.
[0035] Optionally, the simulation industrial computer is also used to construct a virtual test scene, wherein the preset virtual test scene includes a virtual vehicle moving in real time with the test vehicle, and a virtual participant moving in real time with real participants.
[0036] Optionally, the vehicle status information includes: vehicle position coordinate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com