Wrist joint rehabilitation device self-adaptive to changes of human motion axis
A human body movement and self-adaptive technology, applied in the direction of passive exercise equipment, physical therapy, etc., can solve problems such as non-coincidence of rotation axes, inability to realize radial deviation movement, and inability to keep coincidence of axes at all times, so as to avoid gap errors, Improvement of comfort and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] This embodiment is a wrist joint rehabilitation device that adapts to changes in the human body's motion axis.
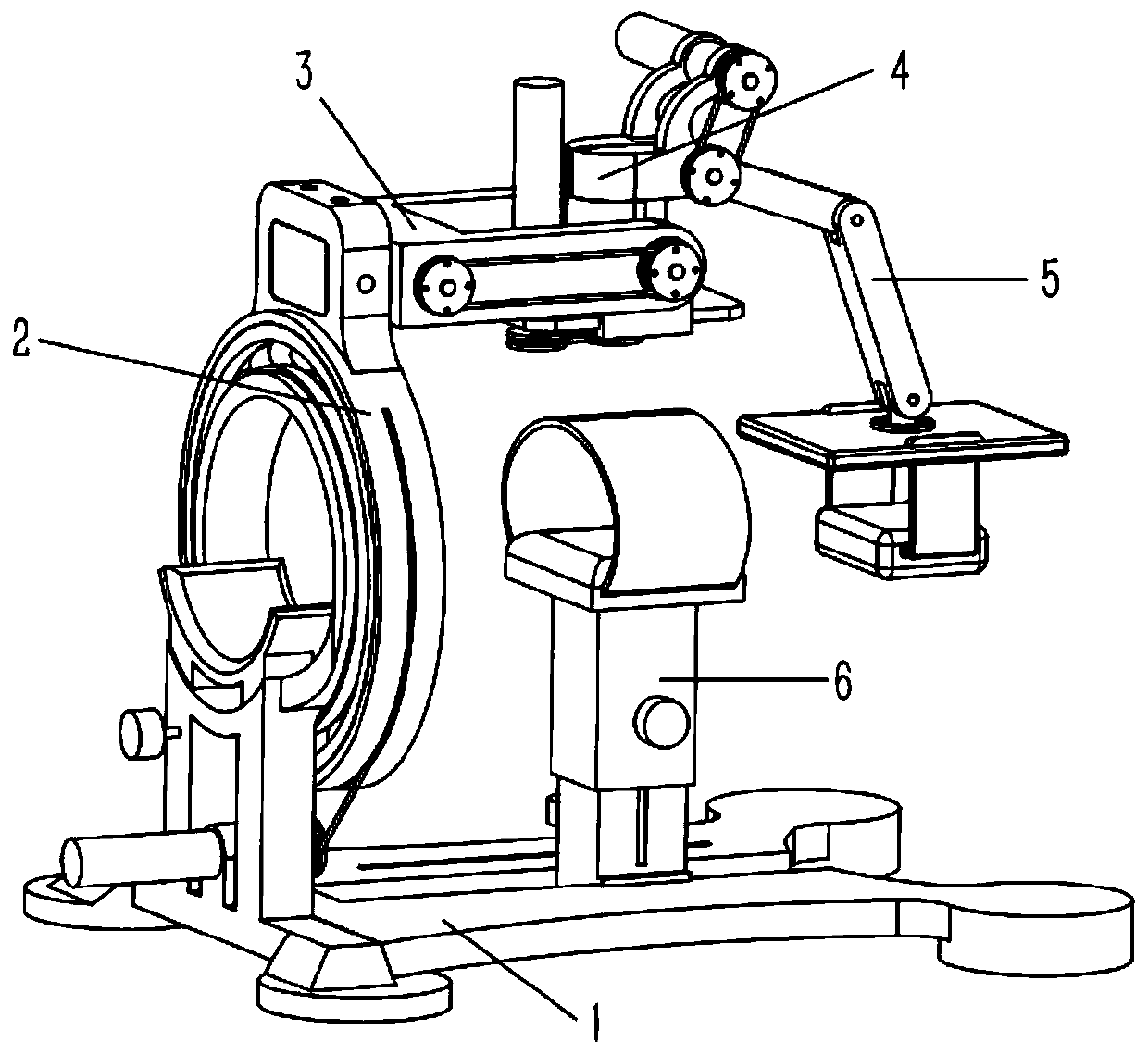
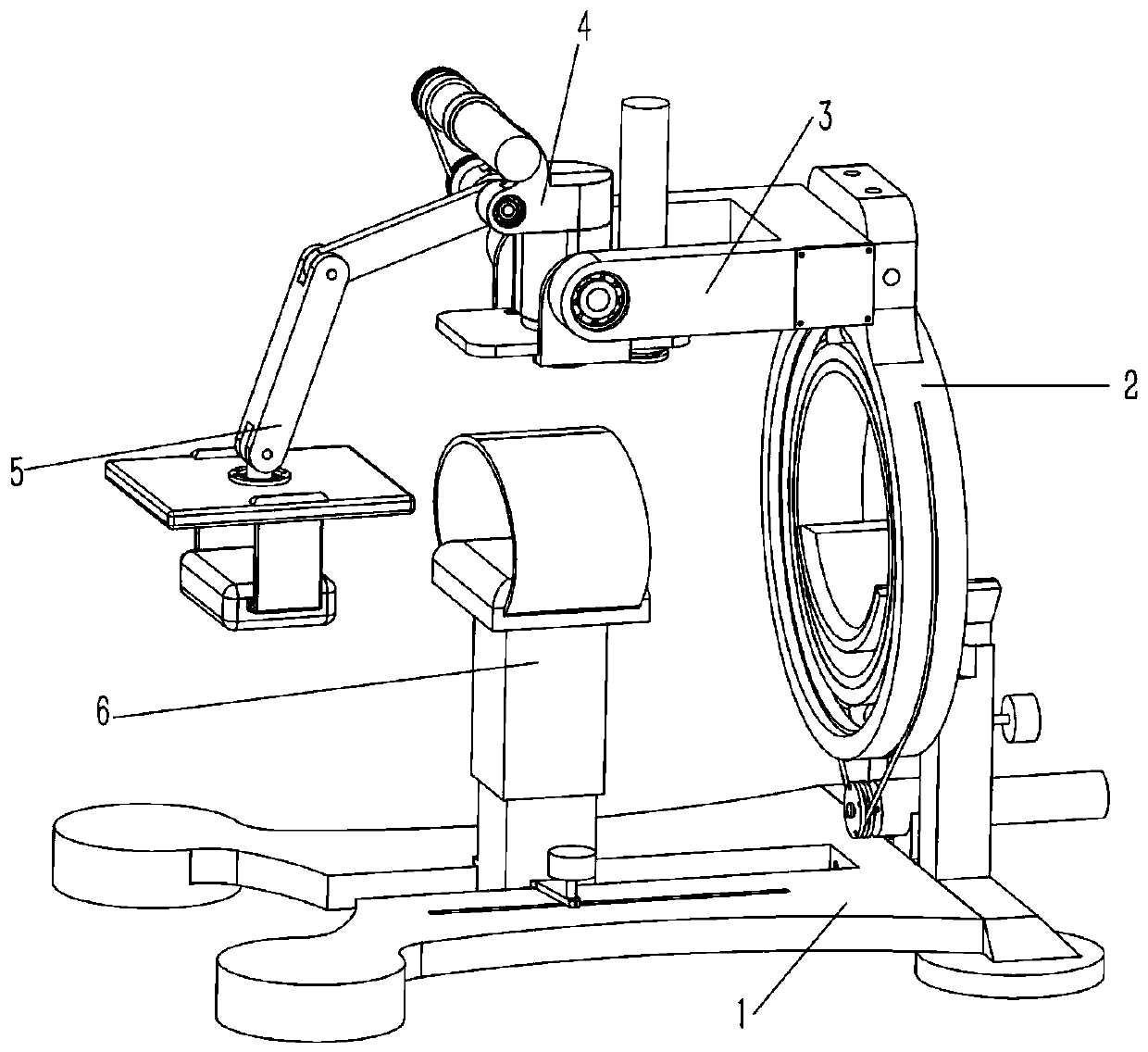
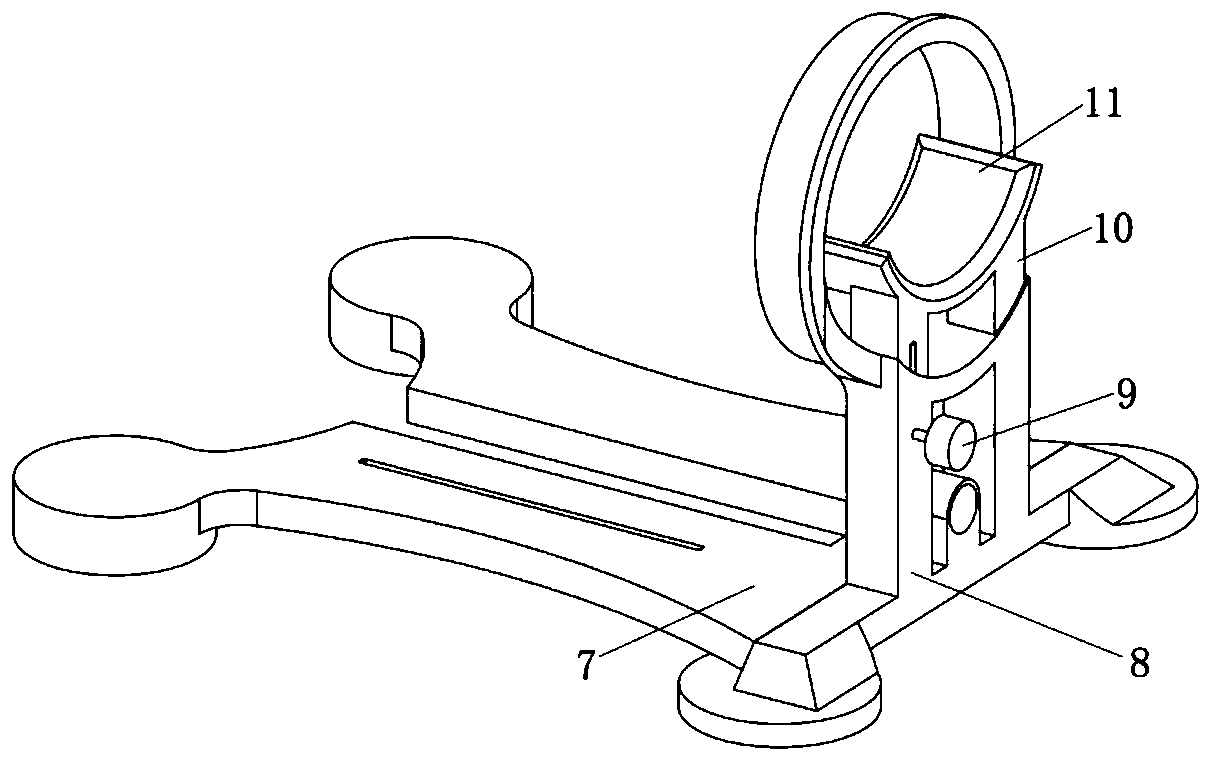
[0039] refer to Figure 1 to Figure 8 In this embodiment, the wrist joint rehabilitation device adapting to changes in the human body motion axis is composed of a base 1, a wrist circling mechanism 2, an ulnar-radial deviation axis following mechanism 3, a wrist flexion and extension and ulnar-radial deviation mechanism 4, a terminal passive mechanism 5 and a wrist The fixing mechanism 6 is composed of; wherein, the base 1 is connected with the wrist fixing mechanism 6 and is fixedly connected with the wrist circling mechanism 2. The base 1 is used to support various mechanism components, and the base structure also includes an elbow height adjustment mechanism. During installation, the centerlines of the wrist fixing mechanism and the wrist circling mechanism and the axial chute axis of the bottom plate of the base are located in the same vertical plane.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com