A Path Planning Method for Multiple UAVs to Arrive at a Designated Place Simultaneously in a 3D Environment
A path planning, multi-UAV technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, instruments and other directions, can solve the problem of lack of simultaneous arrival application background, etc., to prevent premature and local convergence, promote Generate and maintain diverse effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example
[0086] In order to verify the effectiveness of the path planning method for multiple unmanned aerial vehicles to arrive at the designated place at the same time in a three-dimensional environment, this embodiment uses the Matlab programming environment, and the relevant parameters are set as follows:
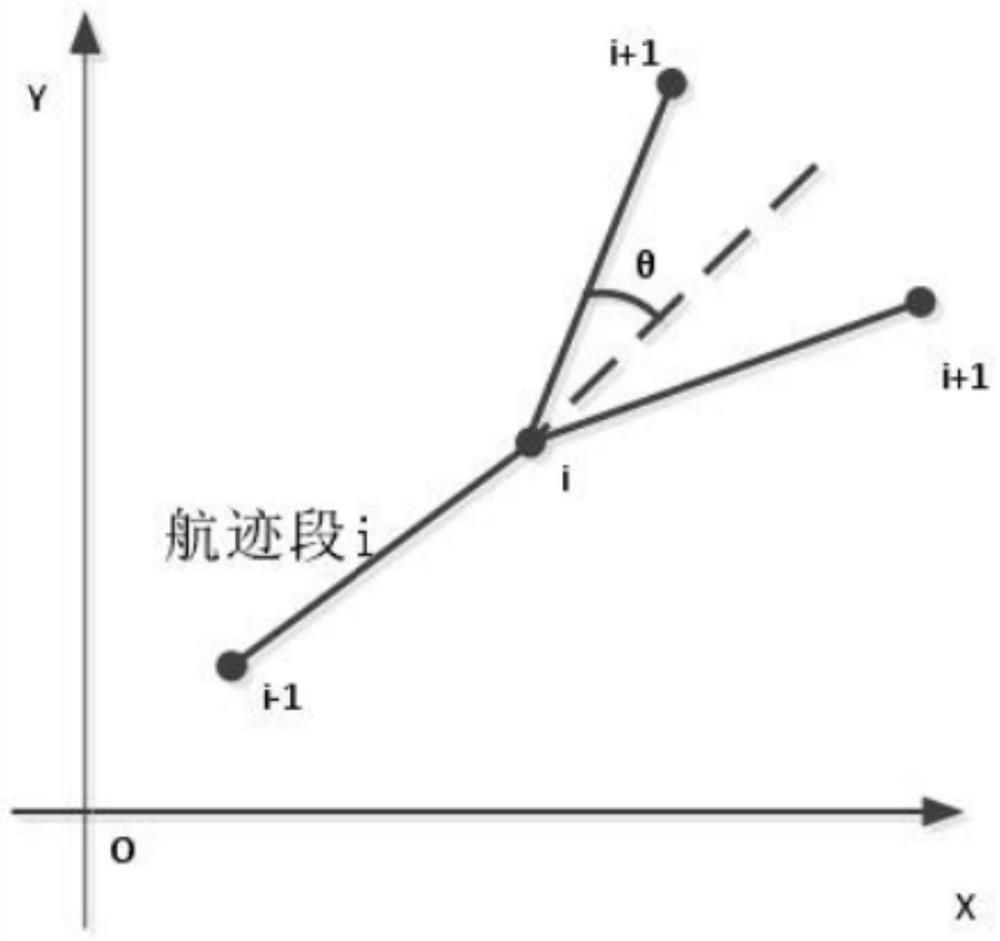
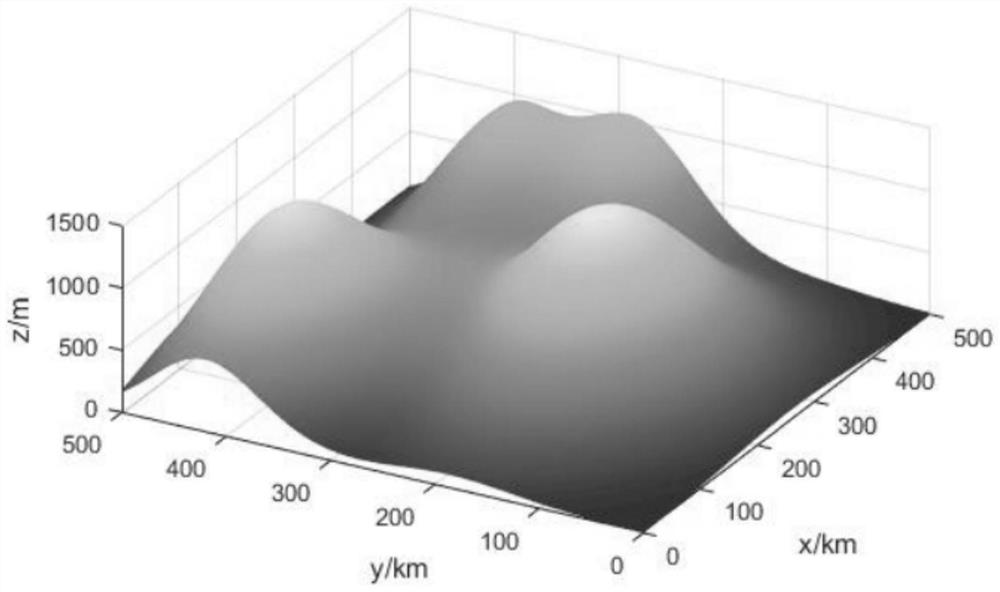
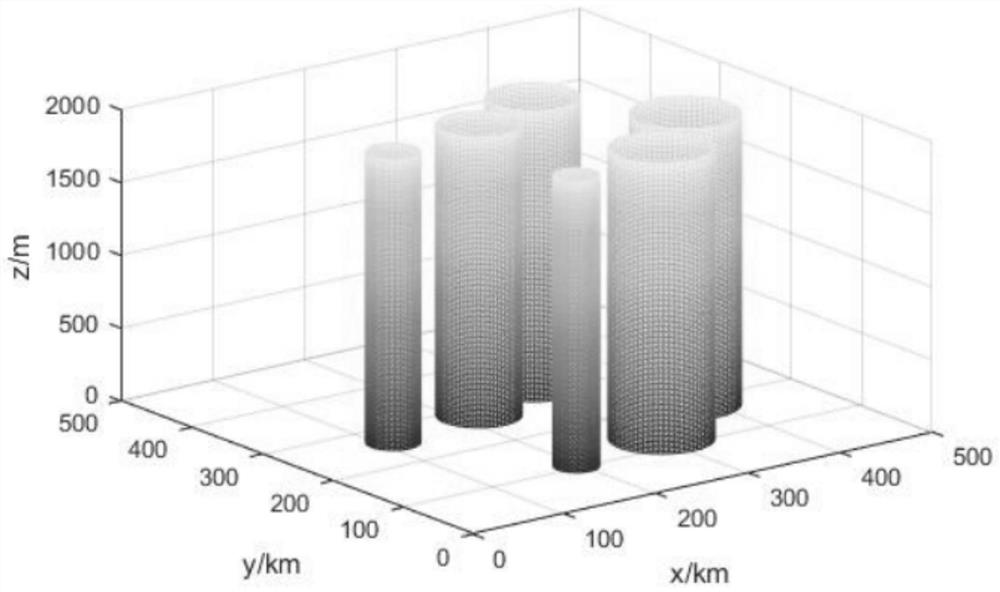
[0087] Population size: 100; maximum number of iterations: 100; maximum / minimum value of adaptive crossover probability: 0.7 / 0.1; maximum value / minimum value of adaptive mutation probability: 0.25 / 0.05; number of drones: 3; number of track segments : 5; maximum yaw angle: 60°; maximum pitch angle: 30°; minimum flight altitude: 100m; minimum turning radius: 20m; maximum flight speed: 200km / h; minimum flight speed: 50km / h; with terrain constraints Track planning is carried out in a 500km×500km×2000m three-dimensional environment threatened by the no-fly zone, and the starting point coordinates of the three drones are set to (205,59,1783), (110,122,594), (495,480,1133),
[0088] Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com