On-line identification and control method and system of rotation speed of dredge pump of dredger based on neural network
A technology of neural network and control method, which is applied in the field of online identification control method and system of dredger mud pump speed, and can solve problems such as inability to cope with offline identification and slow convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
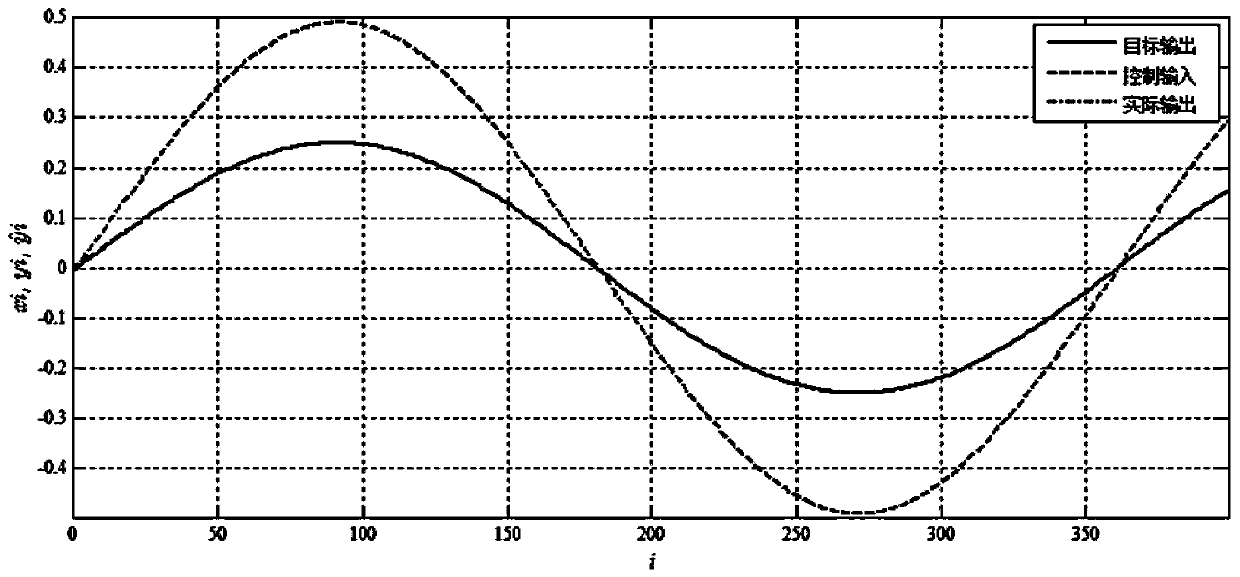
[0020] In this embodiment, Matlab is used to simulate the physical model of the mud pump, and a required speed target is customized.
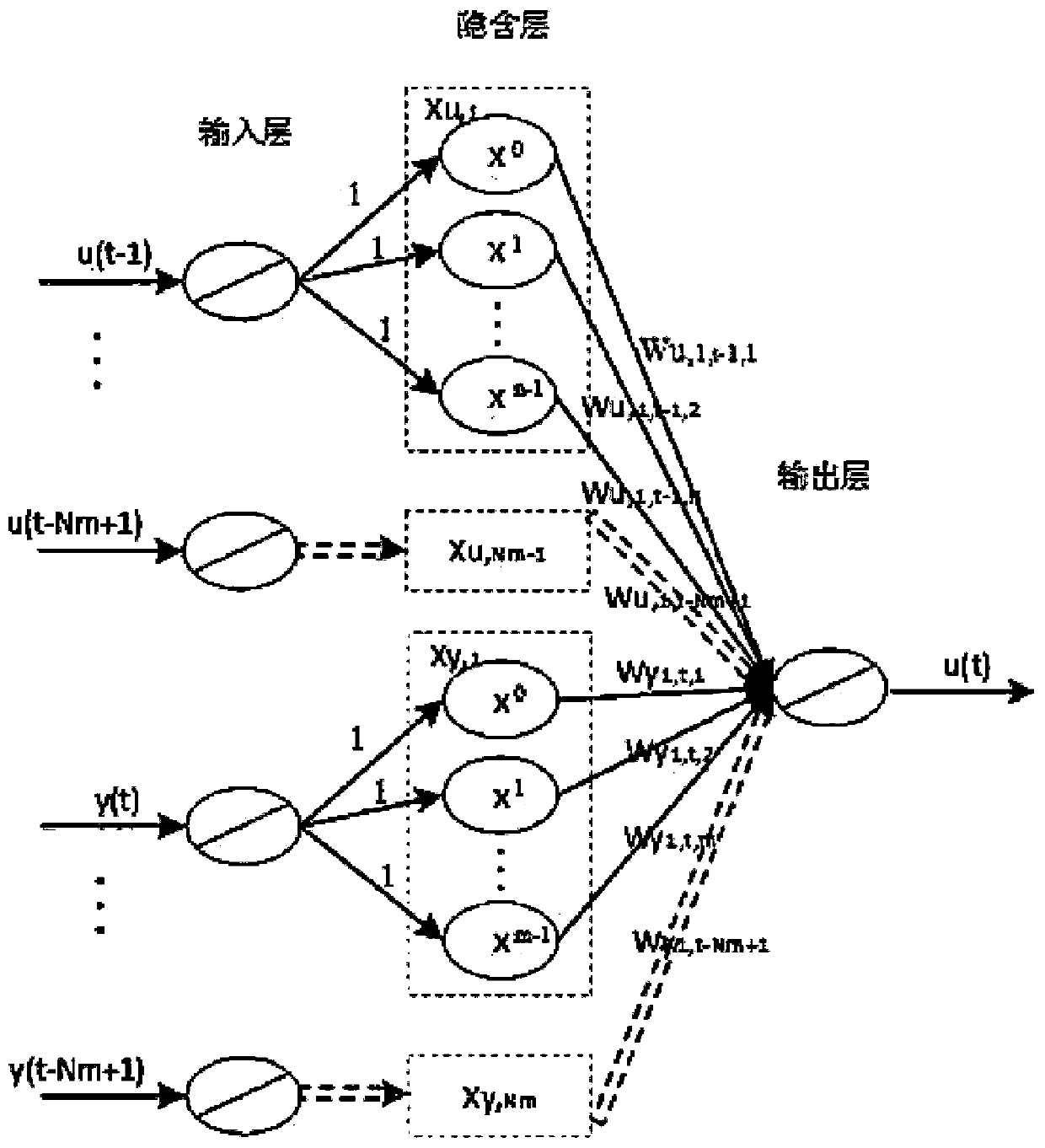
[0021] This embodiment relates to a neural network-based online identification control method for dredging equipment, which specifically includes the following steps:
[0022] Step 1, give the number of identification points N n and polynomial number N m and the number of terms in the Taylor expansion N a , N b
[0023] In this embodiment, the simulation object model expression is used: Objective function: y i =0.25sin[π(i-1) / 180] as an example, assign N n =N a =N b = 2,N m = 3;
[0024] Step 2: Give Top N m The input value and the corresponding output value at +1 control time point. In this example, the initial input value is assigned 1.9702 times the expected output value. The assignment is shown in Table 1 below.
[0025] Table 1, initial values
[0026] Simulation serial number Control input (u) output value (y) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com