Unmanned vehicle relaxed static stability dynamics control method and system
A control method and technology for unmanned vehicles, applied in the field of unmanned vehicles and self-driving vehicles, can solve problems such as oversteering, static instability of lateral dynamic systems, and easy loss of steering stability of unmanned vehicles, so as to improve maneuverability. , meet the needs of use, improve flexibility and the effect of design space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below with reference to the accompanying drawings and examples.
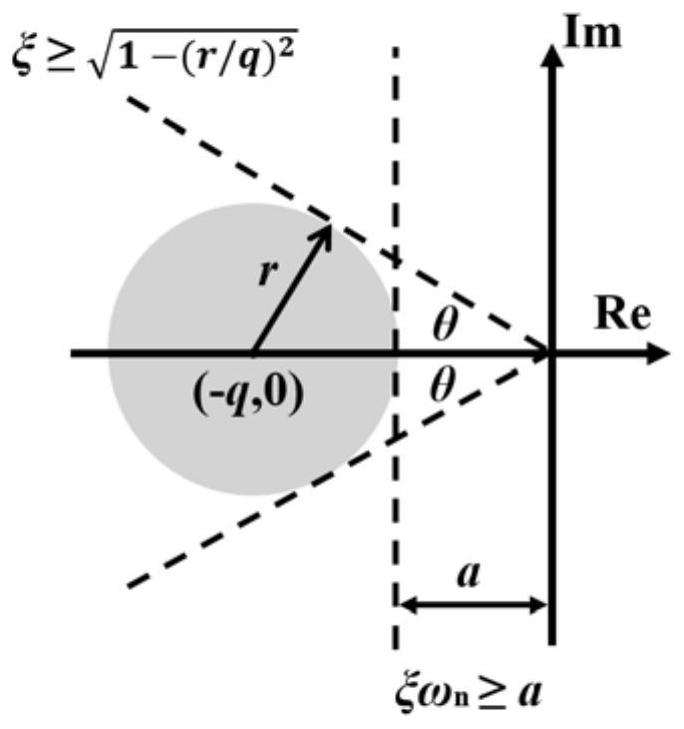
[0041] This embodiment provides a relaxed static stability dynamics control system for an unmanned vehicle. Through the dynamic control method of pole configuration, the target ideal pole position of the lateral dynamics system of the unmanned vehicle is selected, so that the unmanned vehicle can obtain the target ideal pole position. Vehicle dynamics corresponding to pole position.
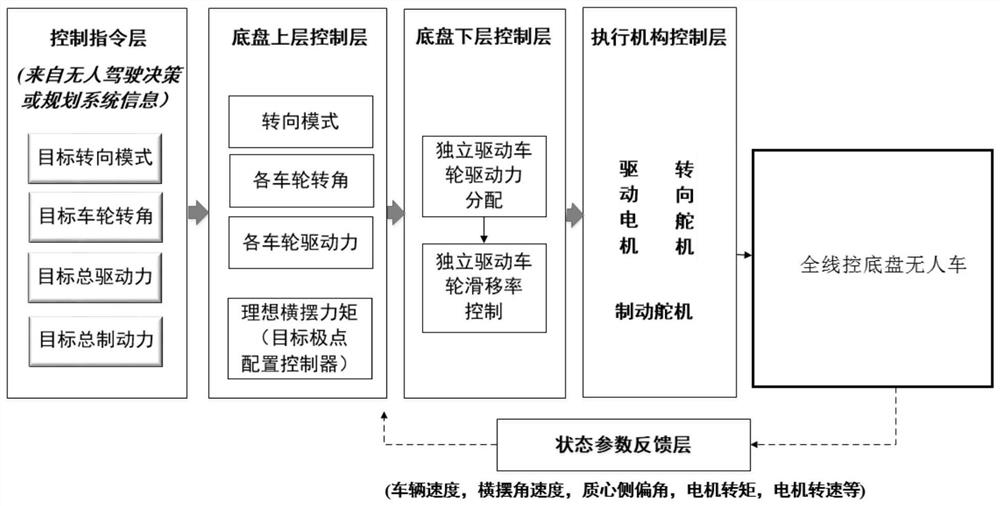
[0042] Such as figure 1 As shown, the unmanned vehicle's relaxed static stability dynamics control system includes five control layers, namely: control instruction layer, chassis upper layer control layer, chassis lower layer control layer, actuator control layer and state parameter feedback layer.
[0043] Among them, the control command layer is used to send the intelligent decision-making results of the unmanned vehicle as the chassis control command to the upper control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com