Aseptic separator and surgically assisted robot instrument system
A divider and instrument box technology, applied in surgical robots, surgical manipulators, operations, etc., can solve the problems of difficult instrument end force feedback to the doctor, increasing the risk of infection of patients, inconvenient installation and disassembly, etc., so as to accurately grasp the operation. Action, easy operation, precise surgical control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0061] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
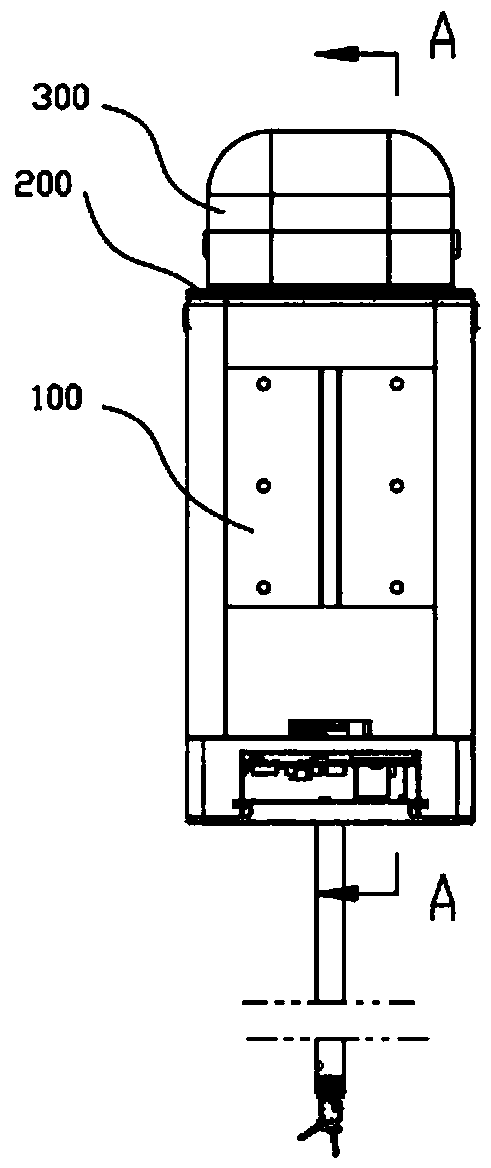
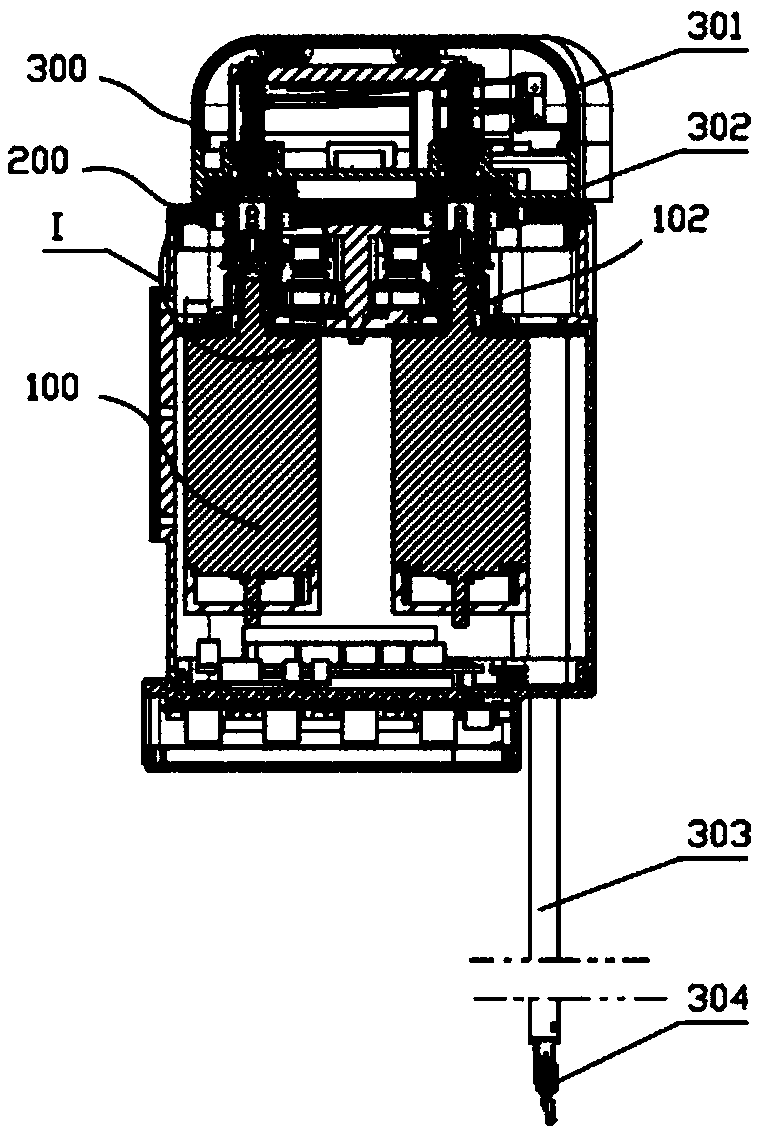
[0062] Such as Figure 1 to Figure 35 As shown, a surgical assisting robot instrument system includes a power part 100 , a sterile divider 200 and an instrument 300 .
[0063] In this embodiment, the power unit includes four power groups, and the four power groups 101 are parallel in a rectangular shape. In other specific embodiments, the number of power groups can be set according to specific needs, such as the number of operating degrees of freedom of the claws of the instrument. Of course, only one power group can also be provided to achieve the purpose of controlling the movement of the claws of the instrument through one or more outputs of the transmission part.
[0064] Such as Figure 1 to Figure 3 As shown, the four power groups all include motors 101, and each motor 101 is connected to a reducer 102, and a telescopic output flange 104 is sleeved o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com