Three-dimensional cooperative positioning method for unmanned aerial vehicle group
A technology for co-location and unmanned aerial vehicles, applied in satellite radio beacon positioning systems, radio wave measurement systems, instruments, etc., can solve problems such as high price and limited application, and achieve improved positioning accuracy, simple hardware implementation, and distance measurement. Error insensitive effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The embodiments and effects of the present invention will be described in further detail below with reference to the accompanying drawings.
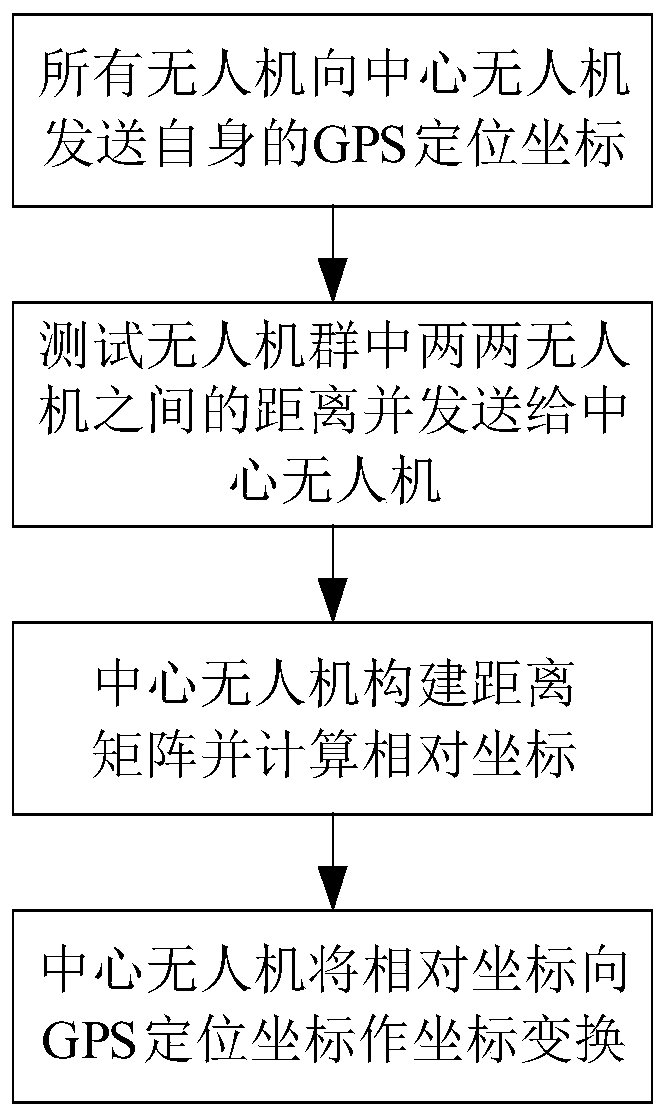
[0018] Reference figure 1 , The implementation steps of this embodiment are as follows:
[0019] Step 1. All drones send their GPS positioning coordinates to the central drone.
[0020] All drones in the drone swarm are equipped with GPS global positioning system, which can obtain their own real-time position coordinates through satellites, and all drones are equipped with communication modules, which can realize communication between any two drones. There is a central drone in the drone swarm, which is equipped with a computing chip. It has certain computing capabilities and can undertake the calculation tasks of the entire drone swarm.
[0021] All drones in the drone swarm send their GPS positioning coordinates G to the central drone undertaking the calculation task, where G={g i }, g i Is the GPS positioning coordinates of the i-th U...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com