Unmanned aerial vehicle vision-inertia fusion indoor positioning method
An indoor positioning and unmanned aerial vehicle technology, which is applied in the directions of measuring devices, instruments, surveying and mapping and navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0037] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
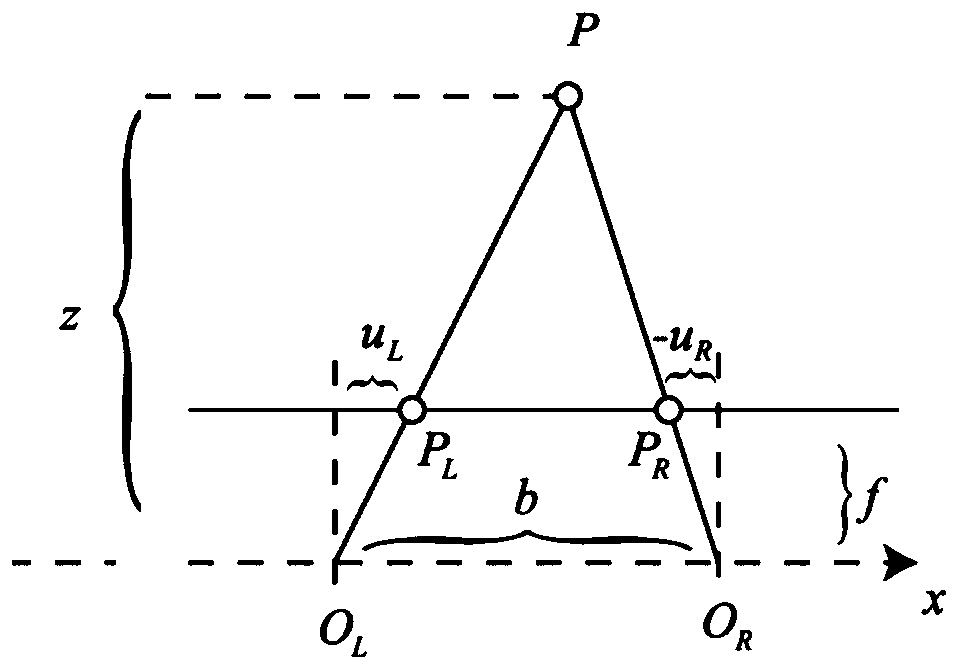
[0038] The invention provides a visual-inertial fusion indoor positioning method for drones, which fuses a binocular vision sensor and an IMU in a tightly coupled manner. Use the binocular parallax method to obtain the scale information of the feature points; use the pyramid LK optical flow algorithm to track the feature points; use the RANSAC (random sampling consistency) algorithm to eliminate the feature points that do not match; Data synchronization; build a sliding window, select and marginalize key frames, and use graph optimization to estimate the UAV's position, attitude, speed, gravity dir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com