Underwater robot path planning method
An underwater robot and path planning technology, applied in three-dimensional position/channel control, navigation calculation tools, etc., can solve problems such as AUV kinematic constraints are not considered, AUV cannot sail, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047]The present invention will be described in detail below in conjunction with the figures and examples.
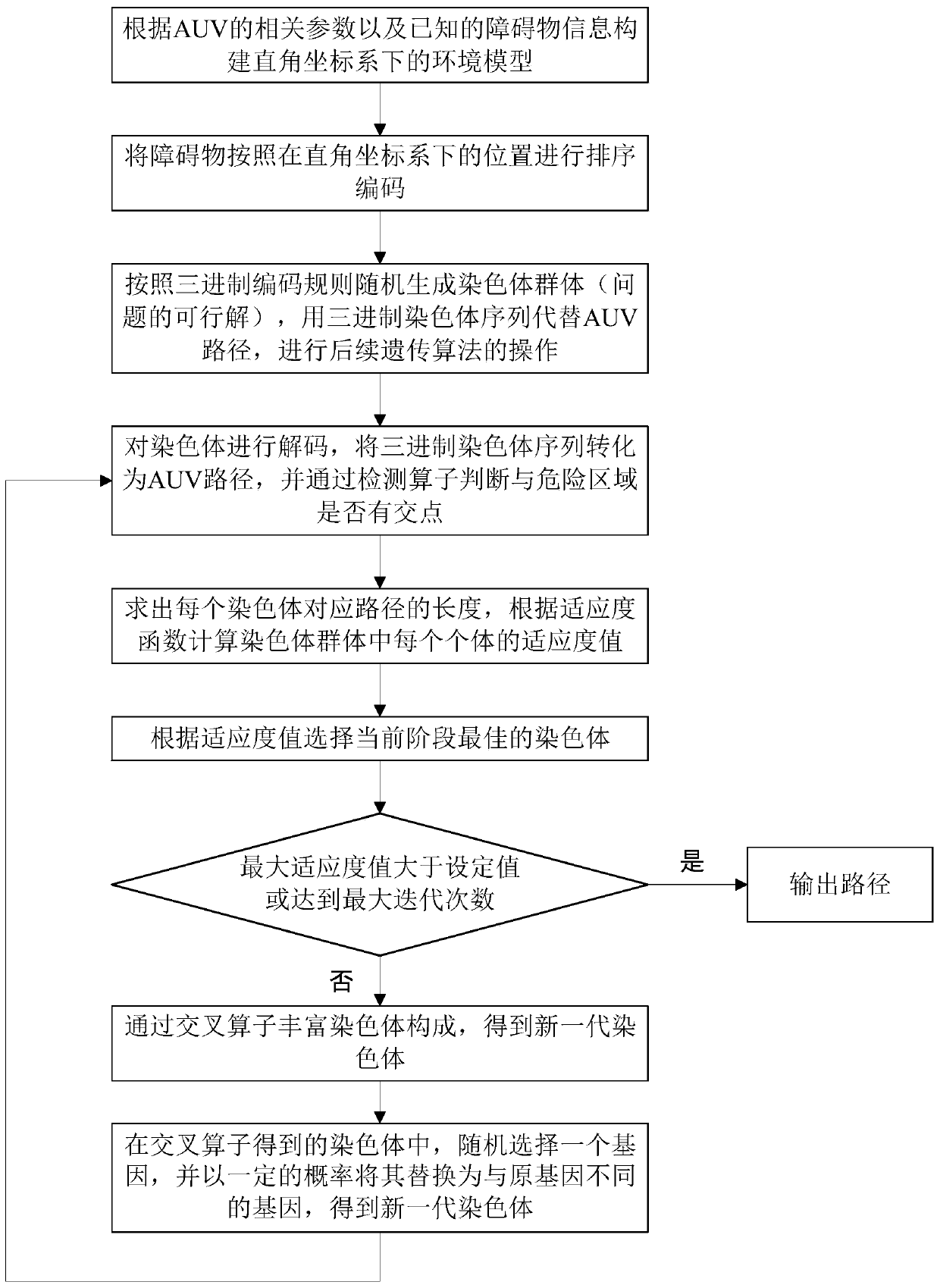
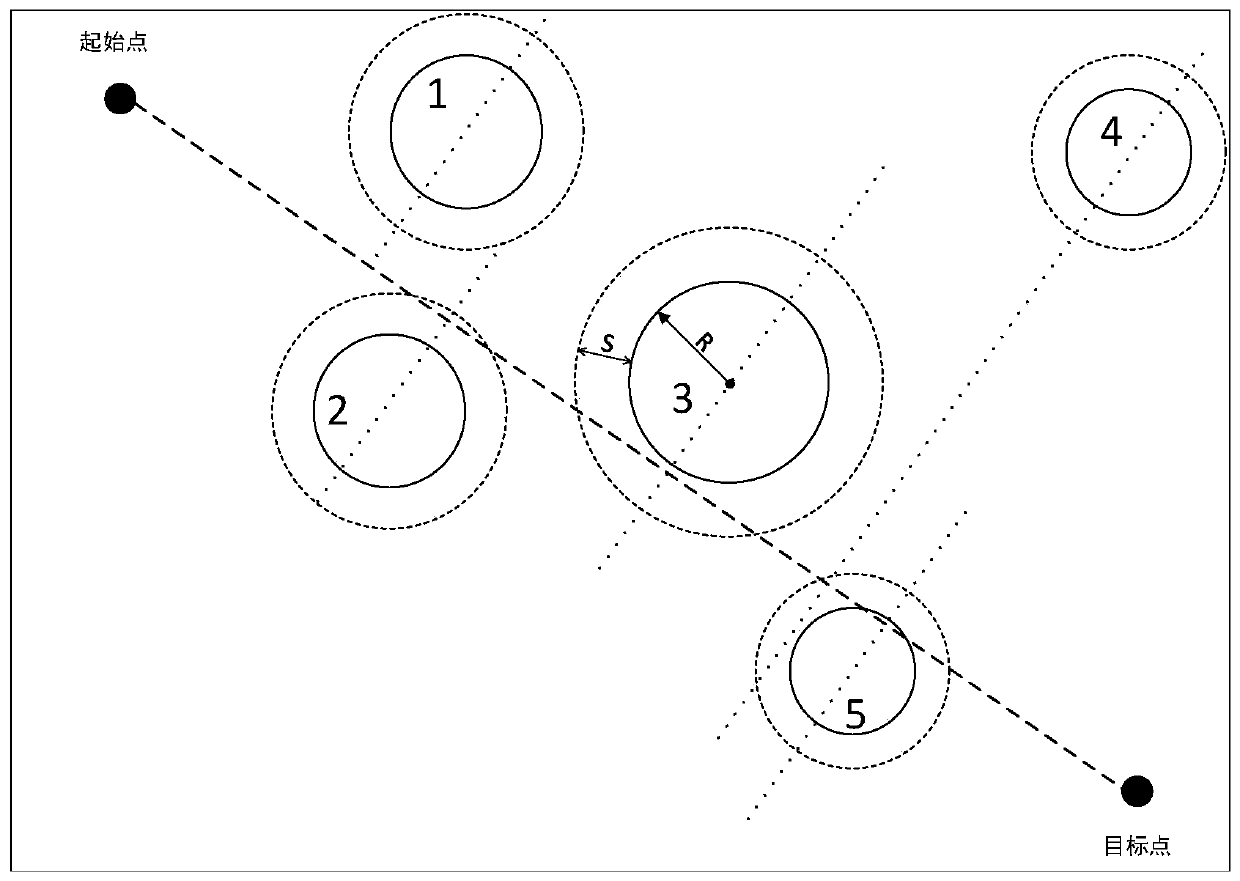
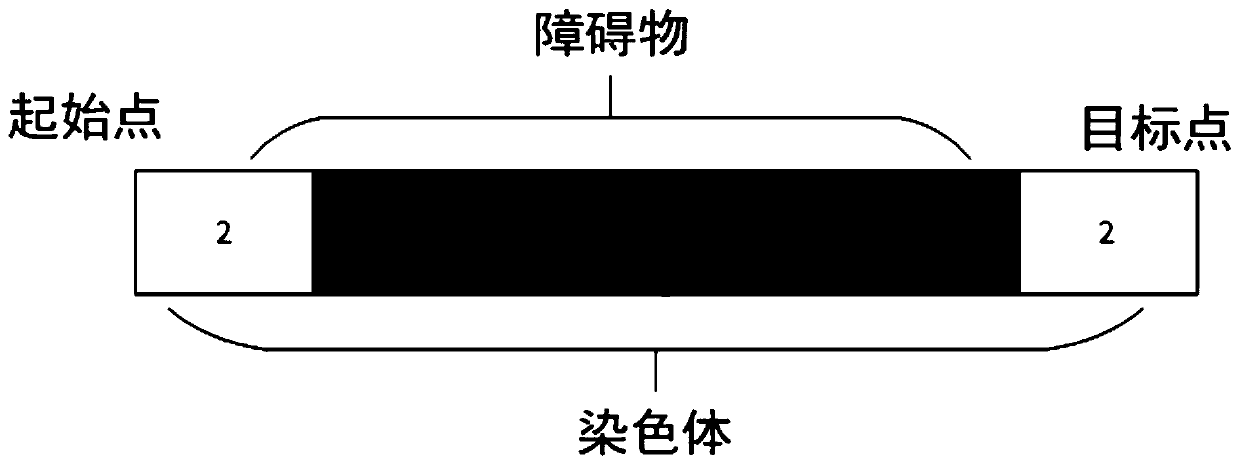
[0048] The invention designs an underwater vehicle (AUV) path planning method based on Dubins curve and genetic algorithm. The method includes: constructing an environment model in a Cartesian coordinate system according to the relevant parameters of the AUV and known obstacle information; sorting the obstacles according to their positions in the Cartesian coordinate system; randomly generating chromosome groups according to ternary coding rules; Decode the chromosomes, find the path and length corresponding to each chromosome, and judge whether there is an intersection with the dangerous area through the detection operator; calculate the fitness value of each individual in the chromosome group according to the fitness function; select according to the fitness value The best chromosome at the current stage; increase the diversity of the chromosome population through cr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com