


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Task allocation method based on task allocation coordination strategy and particle swarm algorithm
A particle swarm algorithm, task allocation technology
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0088] The simulation experiment environment of this paper is on the Windows operating system, and the simulation experiment of the algorithm is realized based on the Matlab2014a environment. The PC configuration is Inter(R)Core-i5-6500@3.2GHz processor, 4G memory.
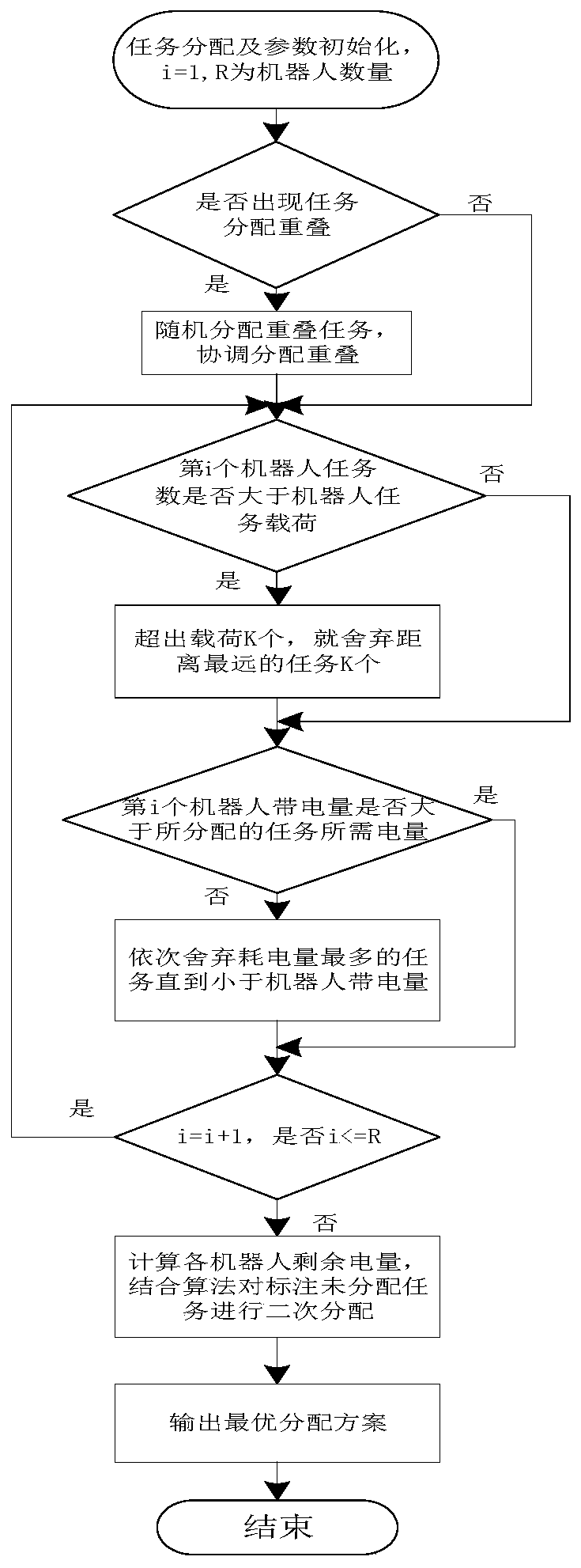
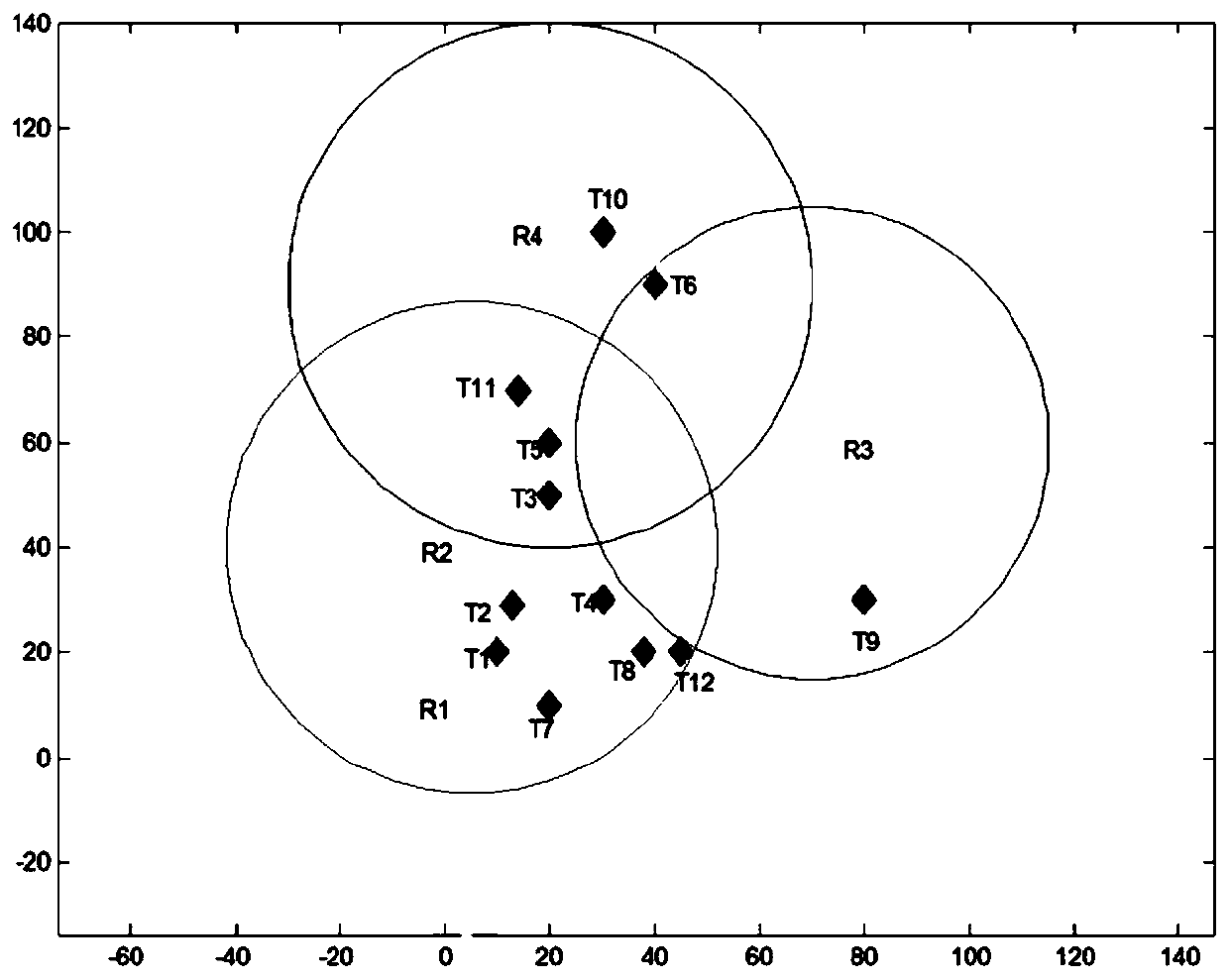
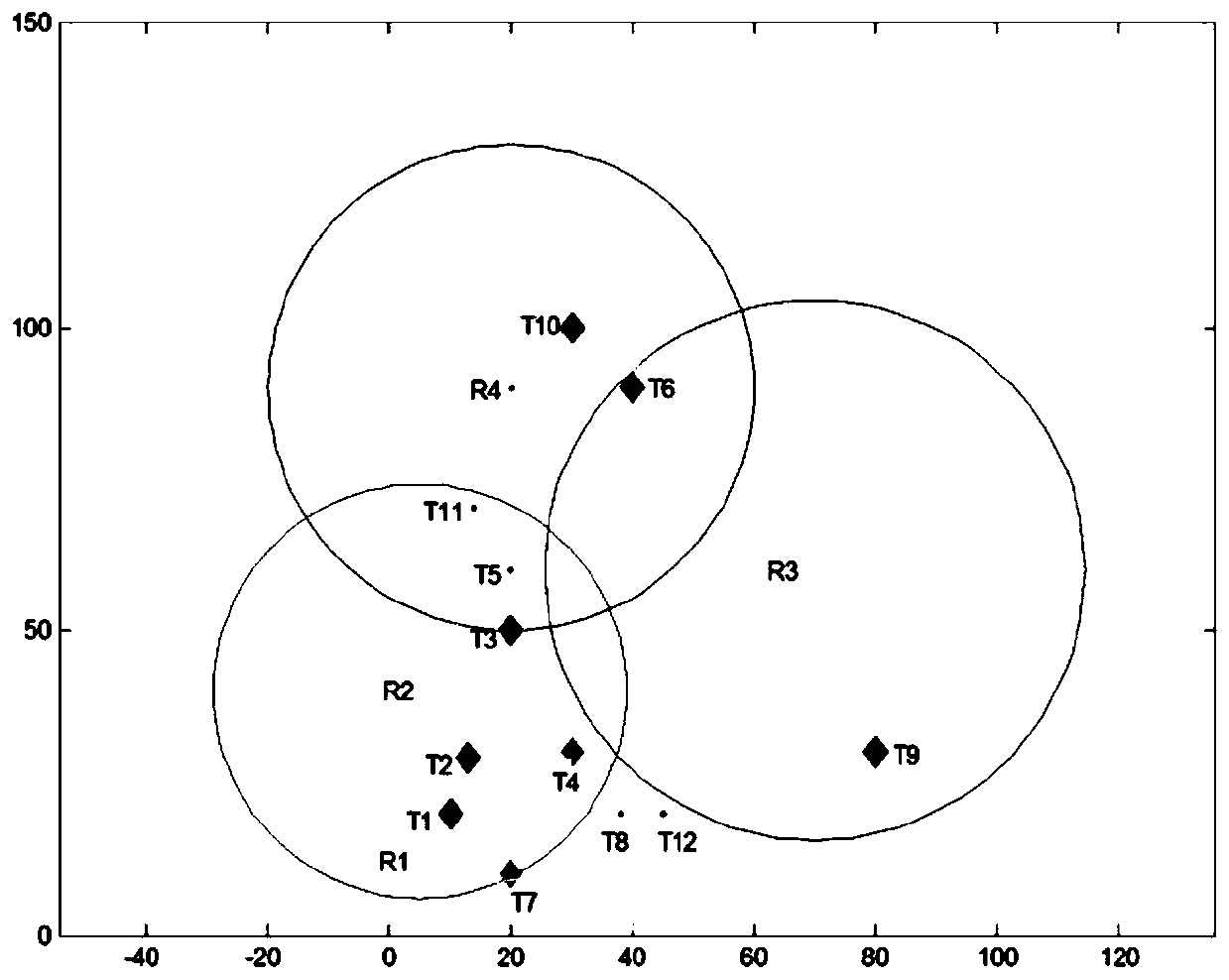
[0089] S1. Use the particle swarm optimization algorithm to optimize the distribution radius to obtain the initial distribution results. The specific operations are as follows:
[0090]The environment is a logistics warehouse, and there are 4 isomorphic robots. Table 1 shows the performance parameters of each robot. There are 12 tasks randomly scattered around, that is, R=4, T=12, the number of particle swarms is set to 10, and the learning factor is c 1 =c 2 =2,ω 0 =0.2,V 0 =0.5, speed range [0,1], set ω in performance index function formula (11) 1 =0.7,ω 2 =0.2,ω 3 = 0.1. And the power consumption per unit distance of all robots is 1, robot coordinates: R 1 (4,10), R 2 (5,40),R 3 (70,60), R 4 (20,90);...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com