A Fast Attraction Repetitive Control Method for Servo System Using Equivalent Disturbance Compensation
An equivalent disturbance and servo system technology, applied in general control systems, adaptive control, control/regulation systems, etc., can solve problems such as low tracking accuracy and inability to suppress periodic disturbances, and achieve high tracking accuracy, fast convergence performance, The effect of complete suppression of periodic disturbances
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0171] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
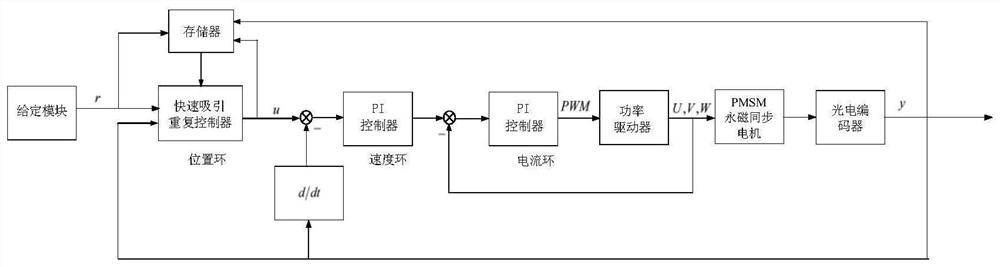
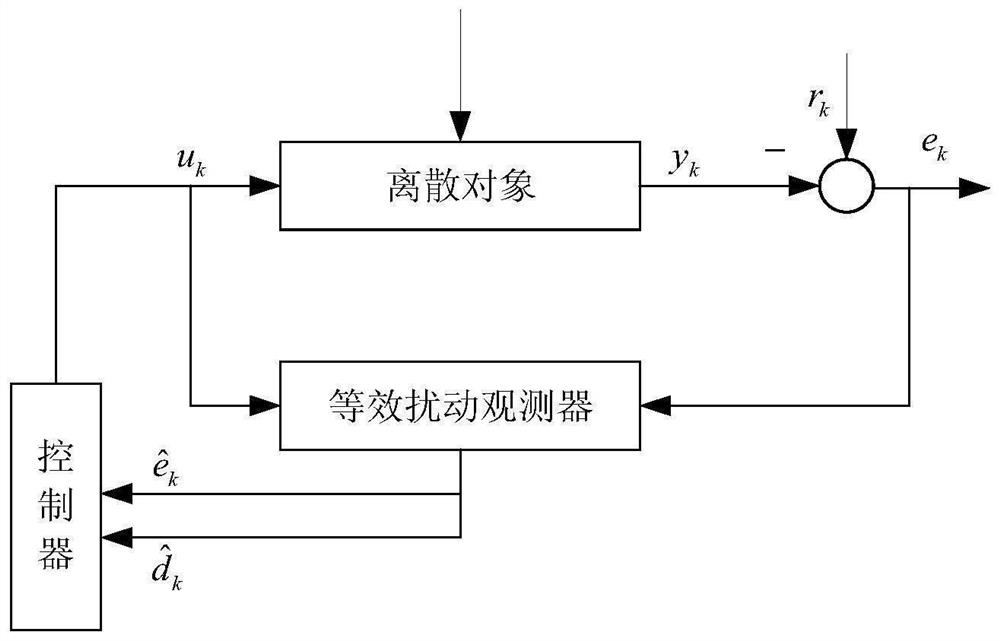
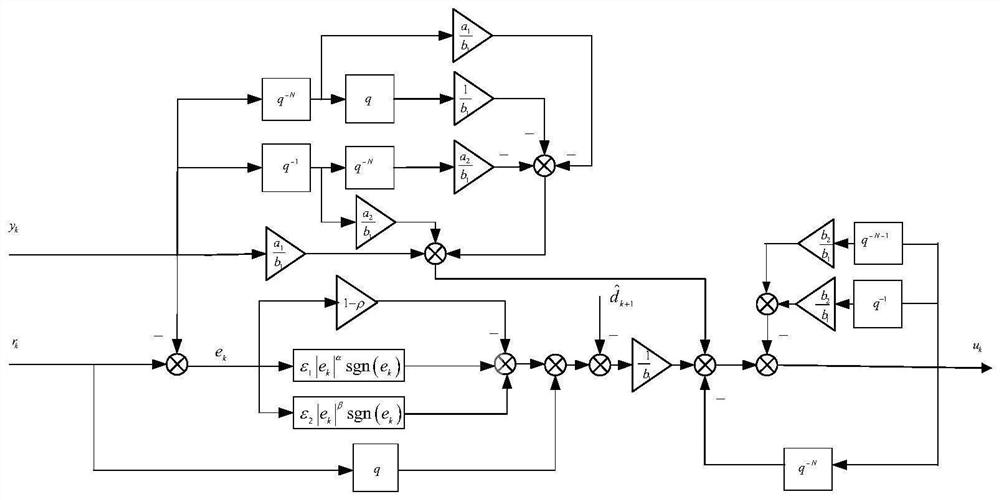
[0172] refer to Figure 1-Figure 39 , a fast attraction repetitive control method using an equivalent disturbance compensation servo system, the controlled object is a periodic servo system, where, figure 1 is the block diagram of AC permanent magnet synchronous motor servo system; figure 2 Equivalent disturbance observer block diagram; image 3 is a quick draw to duplicate the controller block diagram.
[0173] A method for fast attracting repetitive control of a servo system using equivalent disturbance compensation, comprising the following steps:
[0174] Step 1. Given the continuous time fast law of attraction, satisfy (1);
[0175] Step 2. Calculate the convergence time (4) of the fast law of attraction;
[0176] Step 3. Discretize the fast law of attraction (1), expressed as (5);
[0177] Step 4. Given a periodic reference sign...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com