Inspection mousing robot and control method thereof
A robot and mouse-catching technology, applied in the field of patrol mouse-catching robots and their control, can solve the problems of low mouse-catching efficiency, power consumption, energy waste, etc., and achieve the effects of improving mouse-catching efficiency, reducing power consumption and reducing threats.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
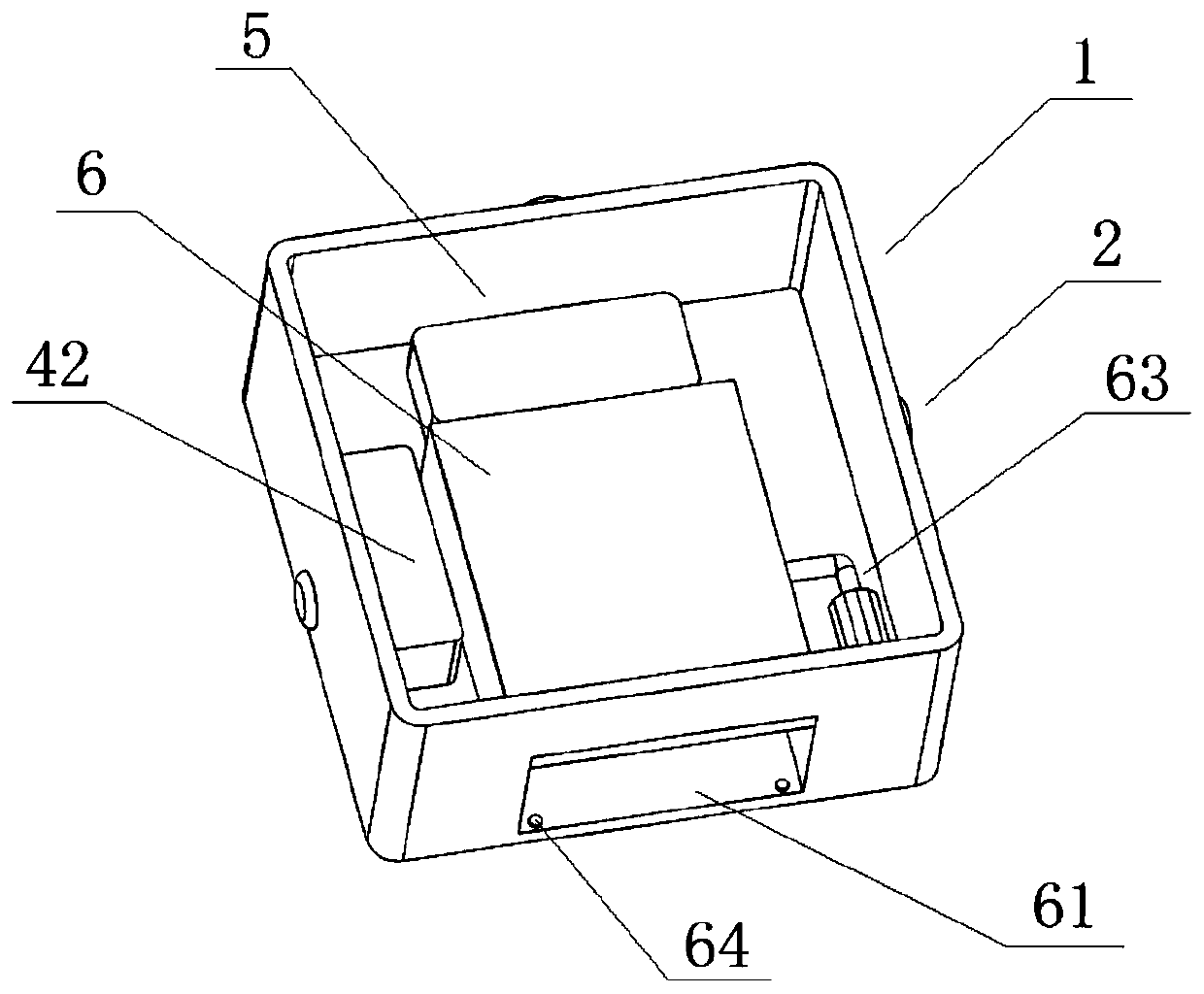
[0040] like Figure 1 to Figure 8 Shown is the first embodiment of a patrolling mouse-catching robot of the present invention, comprising a housing 1, a power unit 4 is provided on the housing 1, a positioning device 2 for avoiding obstacles, for monitoring the presence of mice in the control room and A monitoring device 3 for controlling the outdoor environment, a processor 5 and a trapping device 6 for catching mice are arranged in the housing 1 , and the positioning device 2 , the monitoring device 3 and the power device 4 are all electrically connected to the processor 5 .
[0041] The setting of the power unit 4 enables the robot to move, and then cooperates with the positioning device 2 and the monitoring device 3, so that the patrol mouse-catching robot can have the function of patrolling and monitoring mice. In addition, because the activities of mice are mostly concentrated at night, The monitoring device 3 can also be used to monitor and control the outdoor environme...
Embodiment 2
[0052] like Figure 9 Shown is the embodiment of the control method of a kind of patrol mouse-catching robot of the present invention, comprises the following steps:
[0053] S1. The monitoring device 3 continuously monitors and controls the light intensity of the outdoor environment, and judges whether the controlled outdoor environment is a dark environment; when the controlled outdoor environment is not a dark environment, the patrol mouse-catching robot contacts the wireless charging device 7 and enters a standby state; When the controlled outdoor environment is a dark environment, perform step S2;
[0054] S2. The patrolling mouse-catching robot is released from the standby state, the power unit 4 drives the patrolling mouse-catching robot to move in the control room, the positioning device 2 locates the obstacles in the control room, and the monitoring device 3 monitors the presence of mice in the control room;
[0055] S3. After step S2, when the processor 5 receives t...
Embodiment 3
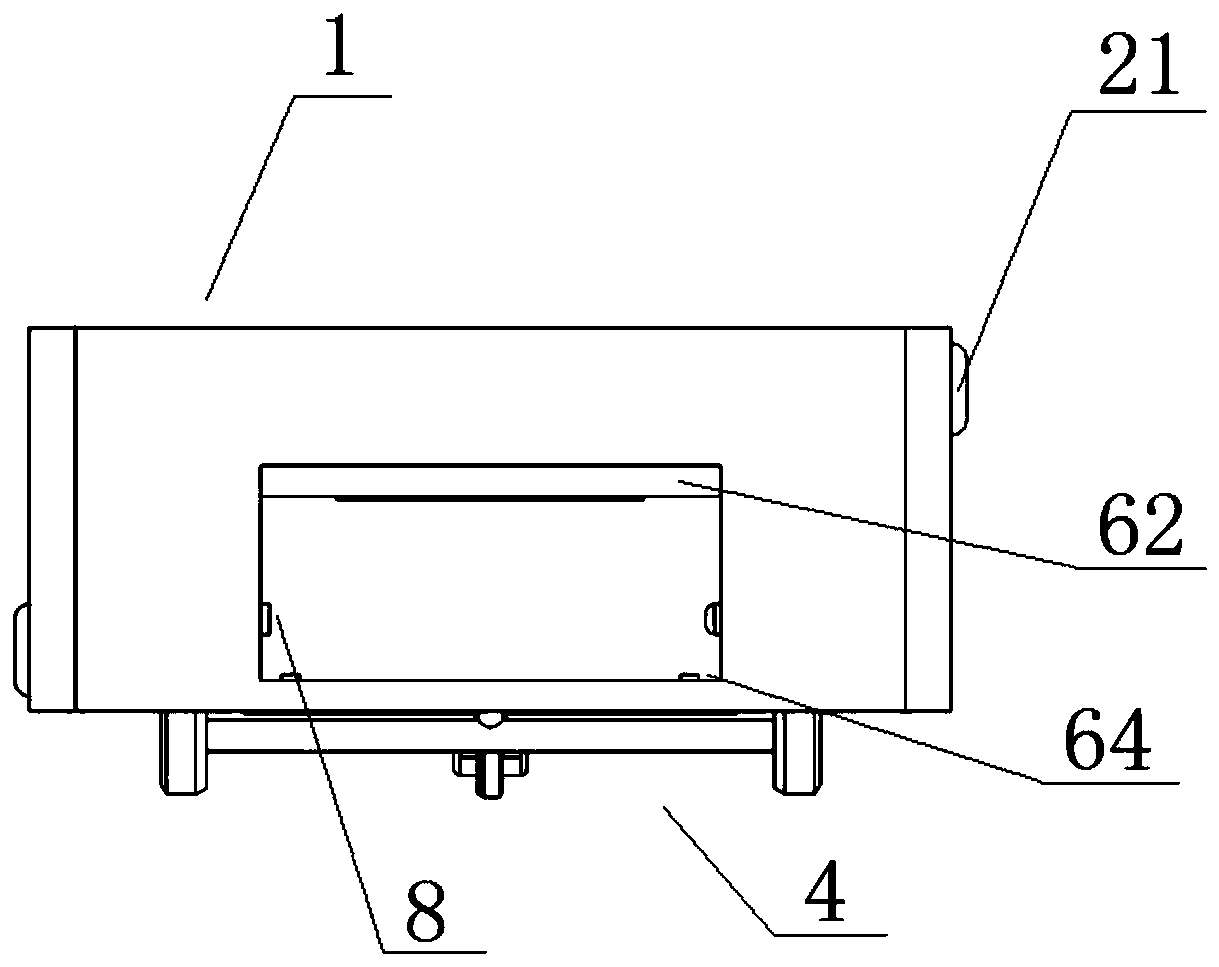
[0061] This embodiment is similar to Embodiment 2, except that the positioning device 2 in this embodiment includes a number of positioning sensors 21 mounted on the outer wall of the housing 1 , and the positioning sensors 21 are electrically connected to the processor 5 . The setting of some positioning sensors 21 enables the patrol mouse-catching robot to avoid obstacles effectively.
[0062] like Figure 2 to Figure 5 As shown, in this embodiment, with the side provided with the hatch 62 as the front of the housing 1, the left and right sides and the back of the housing 1 are equipped with positioning sensors 21, and the positioning sensors 21 located on the left and right sides are located at different heights. The three positioning sensors 21 are all electrically connected to the processor 5 . The positioning sensor 21 can map the control room and locate in real time, plan patrol routes and effectively avoid obstacles.
[0063] In addition, the monitoring device 3 incl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com