Industrial robot sorting method based on active vision
An industrial robot and active vision technology, applied in sorting, manipulators, manufacturing tools, etc., can solve problems such as difficulty in adapting to complex and changeable working environments and tasks, difficulty in robot grasping, and difficulty in visual recognition, so as to avoid stacking and collapse Phenomena, the effect of precise grasping and stacking process and strong environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] A sorting method for industrial robots based on active vision, comprising:
[0030] S1. Prepare
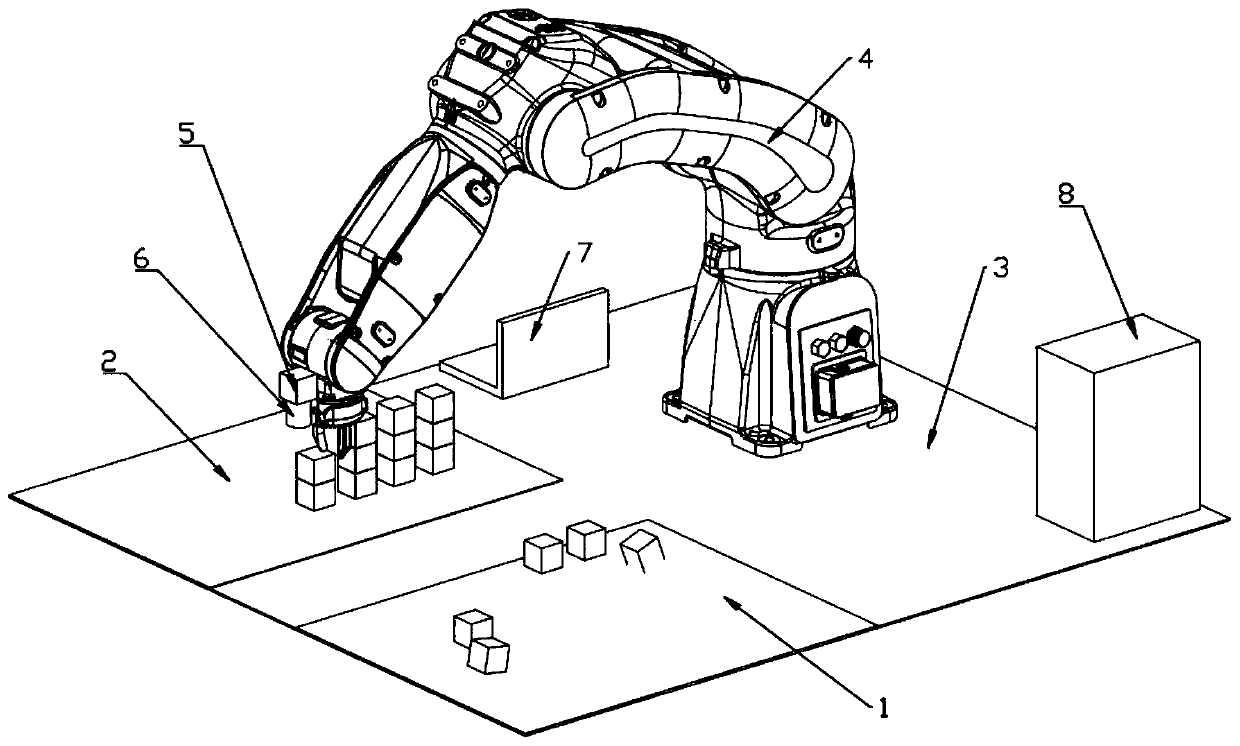
[0031] join figure 1 , including a material placement area, a sorting and stacking area, and an equipment installation area. The materials to be sorted are placed in the material placement area, and the sorting and stacking area is used to stack sorted materials. The equipment installation area An industrial robot is installed inside, and a CCD industrial camera is installed on the end arm of the industrial robot; an auxiliary light source is installed on the end arm of the industrial robot, and the lighting direction of the auxiliary light source is the same as the shooting direction of the CCD industrial camera. An industrial control computer and a control cabinet are installed in the equipment installation area, and the control cabinet is connected with an industrial robot for controlling the motion of the industrial robot. The control cabinet, CCD industrial camera, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com