


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Controllable ball pickup trolley system based on rolling shaft and clamping mechanism
A technology of clamping mechanism and trolley, applied in the direction of balls, sports accessories, etc., can solve the problems of lack of cooperation, cumbersome operation, and the efficiency of picking up balls needs to be improved.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
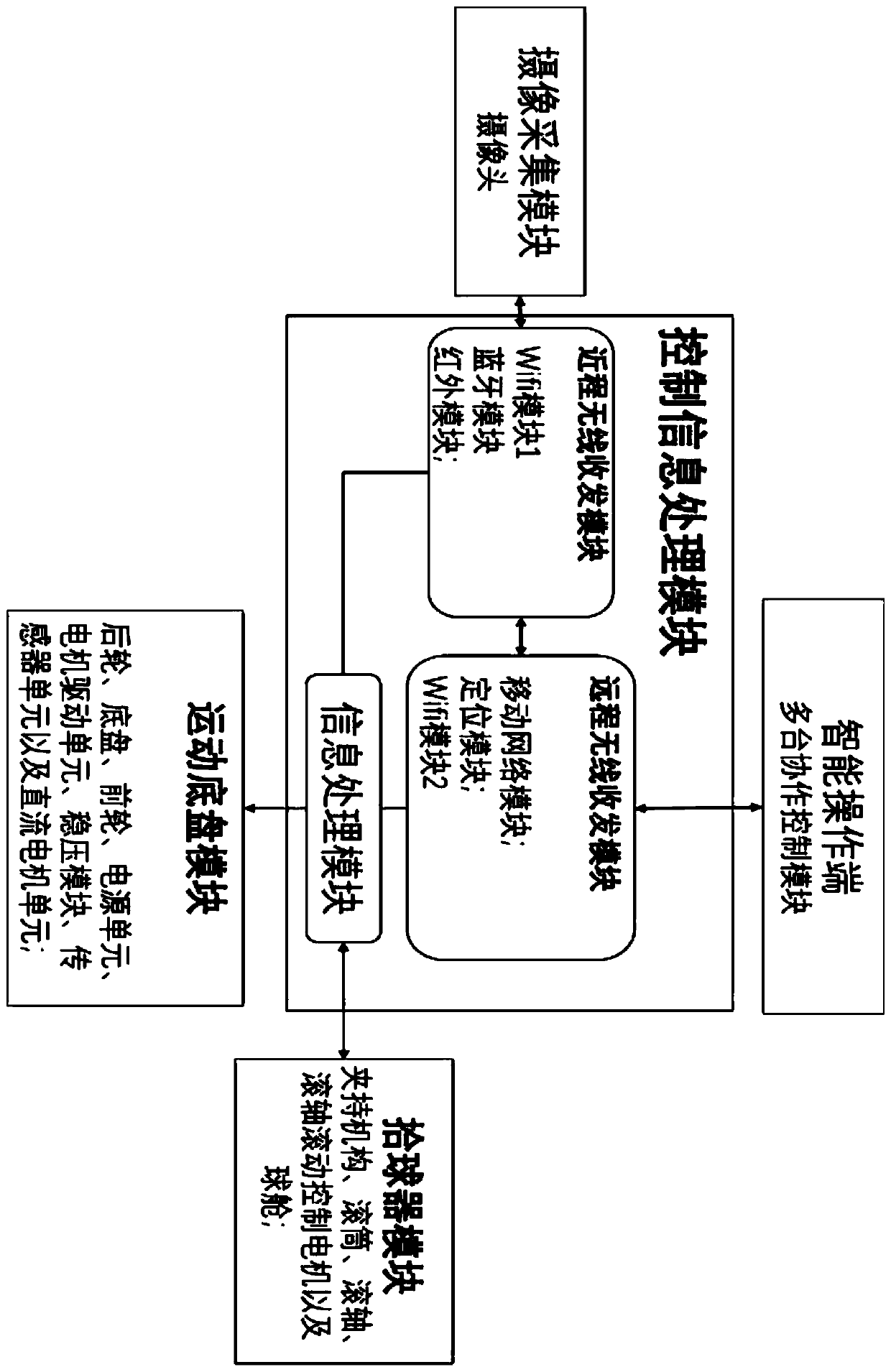
[0119] Such as figure 1 As shown, it is a schematic diagram of the composition and connection of a single trolley during the implementation of a controllable ball picking trolley system based on rollers and clamping mechanisms. In practice, the ball picking trolley system is easy to operate, small and flexible, and the trolley can quickly and accurately run to the position of the ball under the control of the mobile phone APP, and during the walking process of the trolley, the ball picking trolley can be rolled by the clamping mechanism to complete the tennis ball. Grabbing action, which saves time picking up the ball.
[0120] Depend on figure 1 It can be seen that the controllable ball picking trolley system based on the roller and clamping mechanism includes an intelligent operation terminal, a control information processing module, a camera acquisition module, a moving chassis module and a ball picker module in the normal working mode and the autonomous avoidance mode ; ...
Embodiment 2
[0164] Furthermore, during specific implementation, the trolley system can pick up other balls according to different usage scenarios, such as mixed ball courts and golf courses.
[0165] Taking the scene of picking up golf balls as an example, the information processing module controls the rotation speed of the roller, the traveling speed of the trolley and the traveling trajectory based on the visual recognition processing method, according to the current environment, road surface and the number of balls, specifically:
[0166] When the road surface is rough or on a slope, the speed of the vehicle can be appropriately slowed down;
[0167] When the road surface is smooth and the road conditions are good, choose to increase the speed of the vehicle appropriately.
[0168] During specific implementation, for tennis courts, they are mostly flat courts, and when the court is loaded, the traveling speed on a flat and smooth road is about 30 meters per minute; the traveling speed ...
Embodiment 3
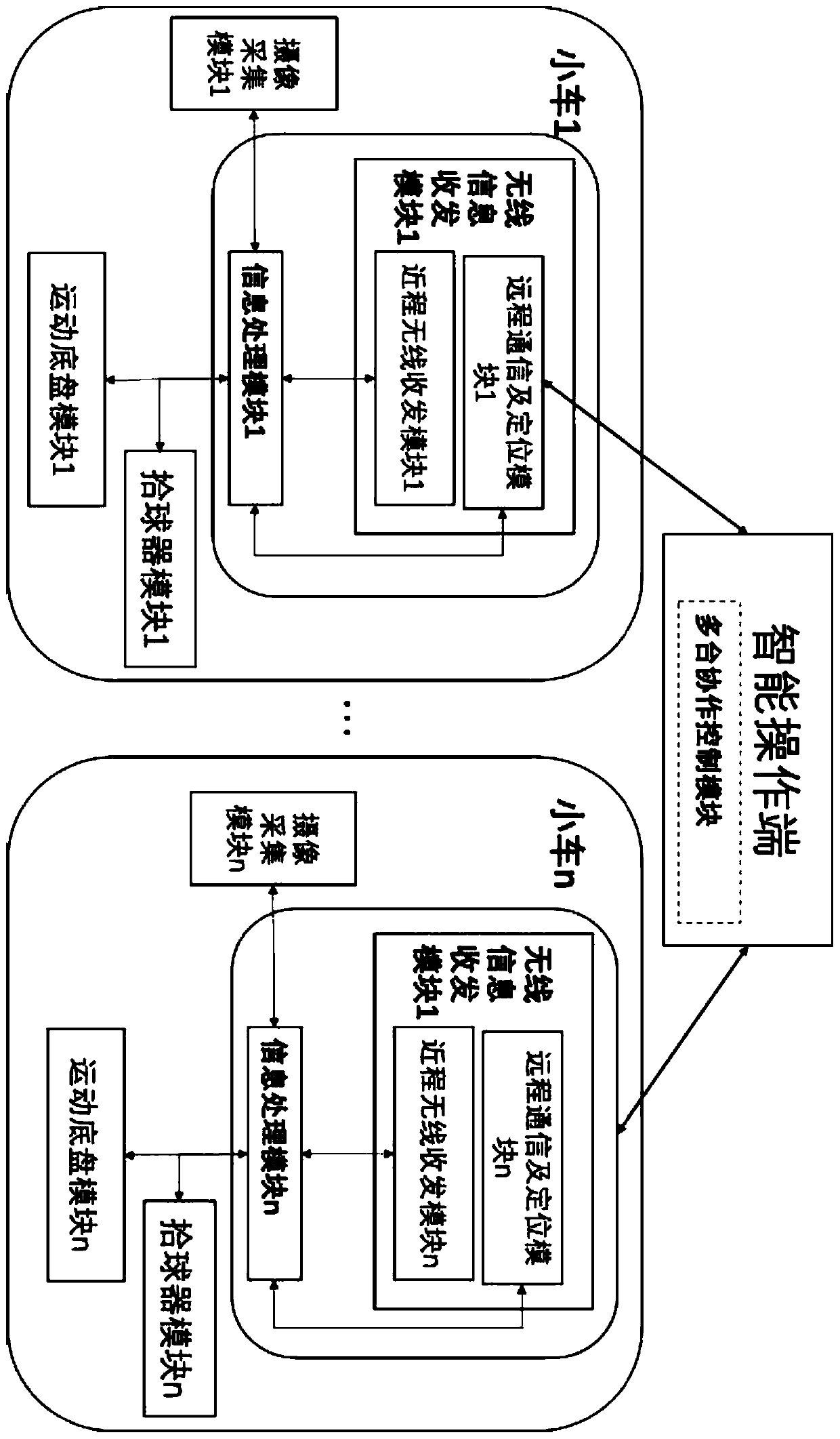
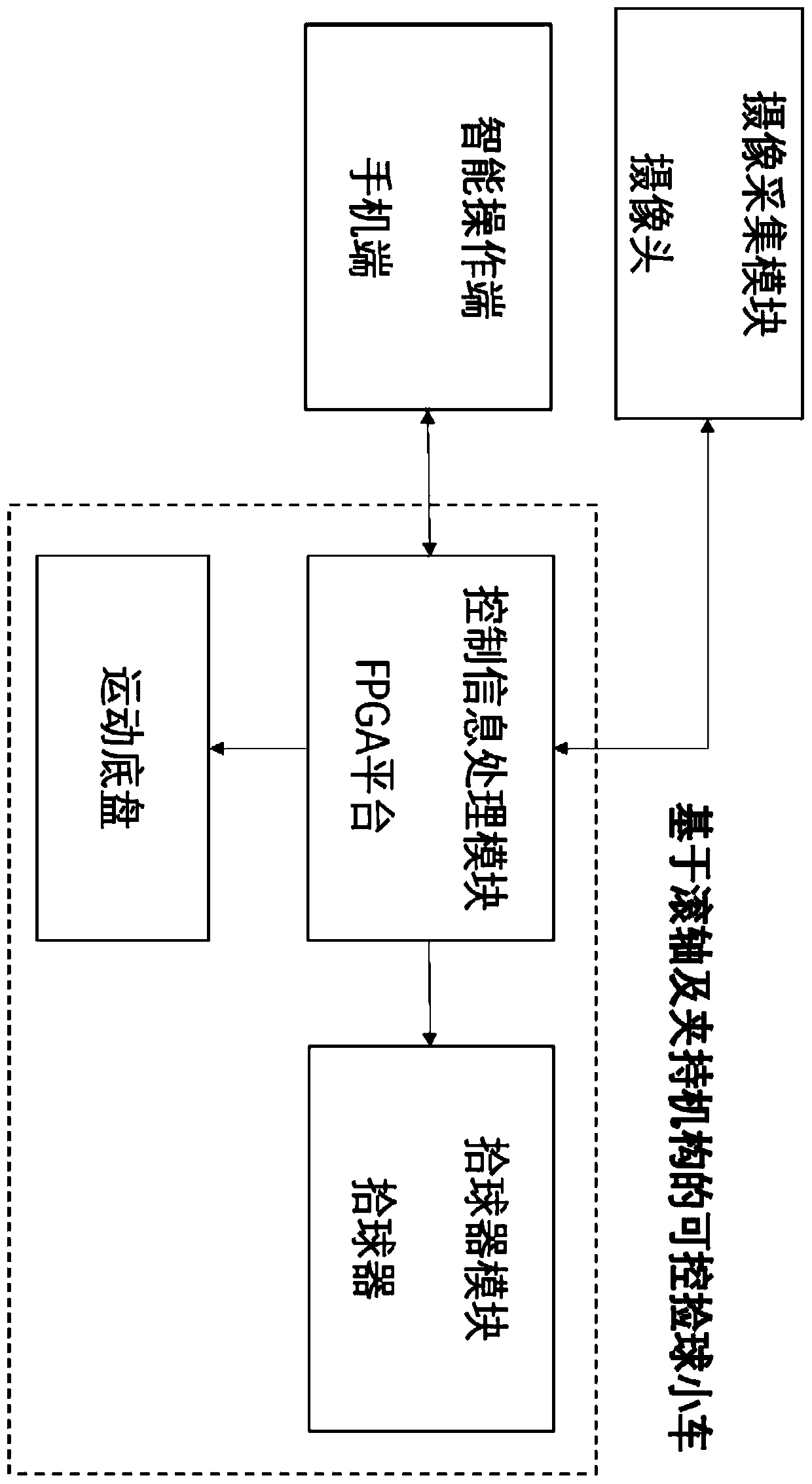
[0178] Further, when the number of trolleys is greater than 1, the intelligent operation terminal is located on the controllable ball picking trolley, or outside the controllable ball picking trolley. During the specific implementation, the schematic diagram of the system composition is as follows: figure 2 shown. The composition block diagram of each car is as follows image 3 shown.
[0179] figure 2 When multiple cooperative control modules of Zhongdang intelligent operation terminal are located on the car, it is a cooperative mode;
[0180] Located outside the car, it is a non-cooperative mode, and its working process includes the following steps:
[0181] Step a). The intelligent operation end defines the ball picking range, and sends a status check request to all the cars.
[0182] Step b). After the car receives the signal from the first step, it tries to establish a communication network with other cars; after receiving the signal, the car feeds back its own GPS...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com