A Behavior-Based Self-Organizing Coordinated Control Method for Multiple UUVs
A coordinated control and self-organization technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as poor dynamics and robustness, reduced model practicability and synergy, and application scene restrictions. Achieve powerful self-organizing effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in further detail below with reference to specific embodiments, but the embodiments of the present invention are not limited thereto.
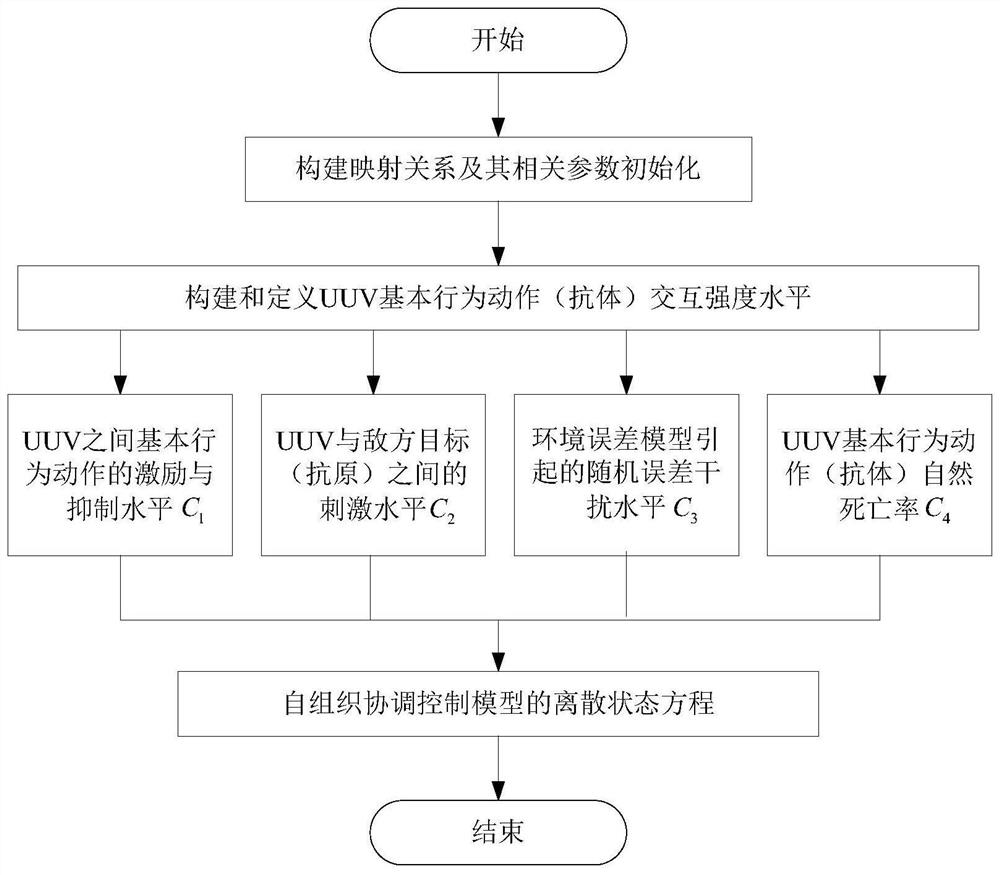
[0048] like figure 1 As shown, in order to overcome the problems of the existing coordinated control model in the application of multi-UUV systems to hunt down enemy targets, inspired by the immune network, this embodiment proposes a behavior-based multi-UUV self-organization coordinated control method to achieve a distributed structure. The basic behavior of the next multi-UUV system is to round up the enemy target. First, the corresponding relationship between the immune system and the multi-UUV system is constructed, and basic behaviors (antibodies) such as navigation and patrol, perception detection, and target orientation are designed; secondly, a coordinated control dynamic model based on basic behaviors is proposed, and the operation is realized. Fractional Brownian motion modeling of envi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com